摘 要: 提出了一種基于PCC 的高可靠性步進(jìn)式水輪機(jī)智能調(diào)速器, 它實(shí)現(xiàn)了用可編程計(jì)算機(jī)控制器模塊進(jìn)行頻率測量, 并采用基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID 控制策略, 從而使調(diào)速器具有測頻精度高���、調(diào)節(jié)速度快、可靠性高等優(yōu)點(diǎn)�����。電站試驗(yàn)及運(yùn)行表明, 該調(diào)速器具有良好的動靜態(tài)特性�����。
關(guān)鍵詞: 水輪機(jī)調(diào)速器; PCC; 智能PID
水輪機(jī)調(diào)速器是水電站重要的基礎(chǔ)自動化設(shè)備, 其質(zhì)量的好壞直接影響到電能品質(zhì)和電站安全及經(jīng)濟(jì)運(yùn)行。目前市場上主要有基于單片機(jī)����、工業(yè)控制計(jì)算機(jī)、可編程控制器等三種類型的微機(jī)調(diào)速器���。雖然微機(jī)調(diào)速器的性能不斷得到改善, 但縱觀微機(jī)調(diào)速器的發(fā)展, 還存在以下問題[1 ] : (1) 基于單片機(jī)的微機(jī)調(diào)速器一般均采用單片機(jī)實(shí)現(xiàn), 其硬件多為自行設(shè)計(jì)制造, 元件檢測�、篩選���、老化處理���、焊接及生產(chǎn)工藝等都受到限制, 造成調(diào)速器可靠性較低?����;诠た貦C(jī)的微機(jī)調(diào)速器, 雖有一系列優(yōu)點(diǎn), 但裝置訪問時(shí)間較長, 體積大, 且成本高, 僅適合大型機(jī)組���?����;诳删幊踢壿嬁刂破鞯奈C(jī)調(diào)速器, 雖然可編程邏輯控制器本身的可靠性很高, 但其測頻裝置一般由單片機(jī)實(shí)現(xiàn), 由于該類調(diào)速器的測頻裝置存在與基于單片機(jī)的微機(jī)調(diào)速器同樣的問題, 從而使其可靠性大大降低��。(2) 通常PID 調(diào)節(jié)器的參數(shù)整定是根據(jù)調(diào)節(jié)系統(tǒng)對象的特征參數(shù), 利用推薦公式���、仿真計(jì)算及實(shí)際經(jīng)驗(yàn), 先選擇PID參數(shù)初值, 然后進(jìn)行現(xiàn)場試驗(yàn)并修改調(diào)節(jié)參數(shù)�。這種方法只能根據(jù)當(dāng)時(shí)的工況選擇1~2 組較優(yōu)參數(shù),難以實(shí)現(xiàn)水力機(jī)組所有工況的最佳控制�����。(3) 電液隨動系統(tǒng)中現(xiàn)有的電液轉(zhuǎn)換元件的可靠性和技術(shù)性能與微機(jī)調(diào)節(jié)器的發(fā)展不協(xié)調(diào), 在運(yùn)行過程中存在的堵塞發(fā)卡����、漂移及對油質(zhì)的過高要求和較大的漏油量等問題還未得到很好解決, 從而降低了調(diào)速器整機(jī)的可靠性。本文提出的步進(jìn)式水輪機(jī)調(diào)速器是以可編程計(jì)算機(jī)控制器(PCC) 為控制核心, 采用基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID 控制策略,并配以高可靠步進(jìn)式電液隨動系統(tǒng)為功率放大單元的新一代步進(jìn)式微機(jī)調(diào)速器��。實(shí)際運(yùn)行結(jié)果表明,該調(diào)速器有效解決了現(xiàn)有調(diào)速器存在的問題, 具有良好的靜���、動態(tài)特性和很高的可靠性。
1 步進(jìn)式水輪機(jī)PCC 調(diào)速器硬件[2 ,3 ]
步進(jìn)式水輪機(jī)PCC 調(diào)速器以奧地利B&R 公司的2003 系列可編程計(jì)算機(jī)控制器為硬件主體�����。2003系列可編程計(jì)算機(jī)控制器CPU 模塊采用多處理器結(jié)構(gòu), 其I/O 處理器主要負(fù)責(zé)獨(dú)立于CPU 的數(shù)據(jù)傳輸工作, 而雙口控制器主要負(fù)責(zé)網(wǎng)絡(luò)及系統(tǒng)的管理, 它們既互相獨(dú)立, 又互相關(guān)聯(lián), 從而使主CPU的資源得到了合理使用, 同時(shí)又最大限度地提高了整個(gè)系統(tǒng)的速度����。
1.1 硬件配置 針對目前調(diào)速器在測頻����、人機(jī)接口上存在的問題, 在選擇可編程計(jì)算機(jī)控制器模塊時(shí), 選用CP474 作為調(diào)速器的CPU 模塊, 高速數(shù)字量輸入模塊DI135 作為調(diào)速器測頻輸入模塊, 模擬量輸入模塊AI351 為接力器位移量輸入模塊, 數(shù)字量混合模塊DM438 作為步進(jìn)電機(jī)驅(qū)動脈沖輸出和調(diào)速器開關(guān)量輸入輸出模塊, 緊湊型人機(jī)接口面板P120 作為調(diào)速器的人機(jī)接口, 使得系統(tǒng)更為緊湊�、可靠。結(jié)構(gòu)見圖1�����。
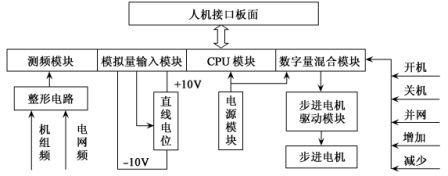
圖1 調(diào)速器硬件結(jié)構(gòu)
1.2 步進(jìn)式電液隨動系統(tǒng) 液壓隨動系統(tǒng)采用步進(jìn)式電液隨動系統(tǒng), 其結(jié)構(gòu)框圖如圖2 所示���。電液隨動系統(tǒng)為二級隨動系統(tǒng)��。第一級為由脈沖分配器���、功率放大回路、步進(jìn)電機(jī)構(gòu)成的機(jī)電隨動系統(tǒng);第二級由二級液壓放大環(huán)節(jié)組成, 引導(dǎo)閥與輔助接力器構(gòu)成第一級液壓放大環(huán)節(jié), 主配壓閥與主接力器構(gòu)成的第二級液壓放大環(huán)節(jié)���。由于液壓隨動系統(tǒng)中取消了傳統(tǒng)的電液轉(zhuǎn)換器, 采用步進(jìn)電機(jī)驅(qū)動的步進(jìn)式引導(dǎo)閥, 從根本上解決了由電液轉(zhuǎn)換器發(fā)卡引起的控制失靈等問題, 使電液隨動系統(tǒng)的可靠性大大提高�����。
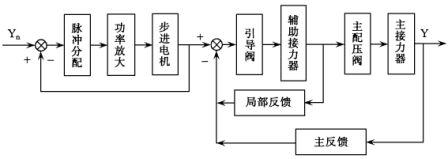
圖2 液壓隨動系統(tǒng)框圖
2 步進(jìn)式水輪機(jī)PCC 調(diào)速器軟件
調(diào)速器軟件分為PCC 部分和人機(jī)接口面板部分��。PCC 部分采用B&R 公司獨(dú)特的PL2000 高級語言編制, 編程更方便, 更利于描述復(fù)雜的控制思想�����。人機(jī)接口面板P120 部分采用PCS 軟件編制��。
2.1 頻率測量 PCC CPU 模塊CP474 內(nèi)部具有時(shí)間處理單元TPU , 該處理單元利用其內(nèi)部4MHz 的計(jì)數(shù)時(shí)鐘測量輸入脈沖的頻率, 而DI135 的作用就是將整形后的機(jī)組或電網(wǎng)頻率信號傳至TPU���。PCC 測頻的基本思路是: 先將機(jī)組或電網(wǎng)頻率信號整形為同頻率的方波信號, 該方波信號經(jīng)DI135 送入CP474 的TPU 輸入通道, TPU 讀取方波信號兩相鄰上升沿之間的計(jì)數(shù)值N , 則所測頻率為:
f = f c/N
式中: f c 為PCC 內(nèi)部計(jì)數(shù)器的計(jì)數(shù)頻率��。
由于頻率測量是影響調(diào)速器可靠性的關(guān)鍵因素之一, 因此, 除了采用波形整形和采用高速計(jì)數(shù)器外, 還特別增加軟件和硬件的容錯及故障自診斷能力���。在設(shè)計(jì)時(shí)按以下原則考慮: (a) 發(fā)電機(jī)可能出現(xiàn)的轉(zhuǎn)速范圍為零到飛逸轉(zhuǎn)速; (b) 連續(xù)兩個(gè)采樣時(shí)刻頻率差值應(yīng)小于Δ= 50 T/Ta , 其中50 為額定頻率, T 為采樣周期, Ta 為機(jī)組慣性時(shí)間常數(shù)。若本次頻率值與上次頻率值之差的絕對值大于Δ,則對機(jī)頻錯誤計(jì)數(shù)器加1��。若錯誤計(jì)數(shù)小于某一定值, 則用上次頻率值作為本次頻率值��。如果錯誤計(jì)數(shù)連續(xù)大于某一定值, 則承認(rèn)本次頻率值�。(c) 對網(wǎng)頻或機(jī)組并入大網(wǎng)時(shí)的機(jī)頻, 若頻率值不在一定的頻率范圍內(nèi), 且達(dá)到一定次數(shù), 則認(rèn)為測頻出錯。(d) 如果連續(xù)一段時(shí)間內(nèi)沒有機(jī)頻網(wǎng)頻信號, 則認(rèn)為機(jī)頻網(wǎng)頻消失, 且發(fā)出相應(yīng)的報(bào)警信號�。
2.2 智能PID 算法 頻率給定與機(jī)組頻率比較, 其偏差E 輸入PID 調(diào)節(jié)器, 形成與偏差相對應(yīng)的調(diào)節(jié)規(guī)律��。機(jī)組并網(wǎng)前, 頻率給定等于電網(wǎng)頻率, 從而使機(jī)組頻率跟蹤電網(wǎng)頻率使機(jī)組迅速并網(wǎng)。為提高機(jī)組并網(wǎng)后增減負(fù)荷的速度, 增加了功率給定( Pg) 的前饋環(huán)節(jié)�。目前國內(nèi)外的微機(jī)調(diào)節(jié)器所采用的調(diào)節(jié)規(guī)律大多數(shù)是PID 型, 而且參數(shù)基本是固定的, 這樣, 當(dāng)系統(tǒng)工況發(fā)生變化時(shí), 調(diào)節(jié)系統(tǒng)就不能很好隨系統(tǒng)工況的變化改變策略, 因此, 調(diào)節(jié)效果將受影響。本文所提出的基于模糊規(guī)則的智能PID 能夠隨系統(tǒng)的變化而自動調(diào)整PID 參數(shù)�。離散化后計(jì)算公式為:
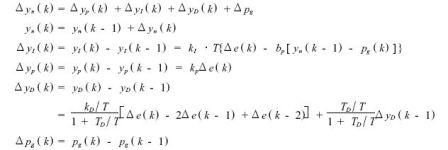
式中: kp 、kI �����、kD 分別為比例增益�����、積分增益����、微分增益, T 為采樣周期, TD 為實(shí)際微分環(huán)節(jié)時(shí)間常數(shù), e (k) 為第k 個(gè)采樣周期的偏差。
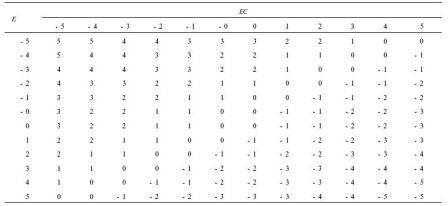
模糊PID 就是在上述常規(guī)PID 的基礎(chǔ)上, 采用模糊推理規(guī)則逐漸地修改PID 參數(shù), 以改善調(diào)節(jié)系統(tǒng)的動態(tài)響應(yīng)[4 ,5 ] ����。其參數(shù)調(diào)整規(guī)則如下: 規(guī)則1 : 如果系統(tǒng)輸出大于給定值, 減少kI ; 規(guī)則2 : 如果系統(tǒng)上升時(shí)間大于所要求的上升時(shí)間, 且無超調(diào), 增大kI ; 規(guī)則3 : 如果在穩(wěn)態(tài)時(shí)系統(tǒng)輸出有波動,適當(dāng)增大kD ; 規(guī)則4 : 如果系統(tǒng)輸出對干擾信號反應(yīng)敏感, 適當(dāng)減小kD ; 規(guī)則5 : 如果系統(tǒng)上升時(shí)間過大, 且kI 較大, 增大kp ; 規(guī)則6 : 規(guī)則2 的優(yōu)先級高于規(guī)則5 , 即當(dāng)上升時(shí)間過大時(shí), 先調(diào)整kI ,再調(diào)整kp ; 并考慮控制系統(tǒng)易于實(shí)現(xiàn)和算法的執(zhí)行時(shí)間。根據(jù)以上規(guī)則, 設(shè)計(jì)出如下用于修改kI, kp 和kD 的Fuzzy 參數(shù)調(diào)整矩陣表���。
表1 qp 調(diào)整表
再定義kI, kp 和kD 參數(shù)調(diào)整算式:
kp = k′p + Cp ×qp
kI = k′I + CI ×qI
kD = k′D + CD ×Qd
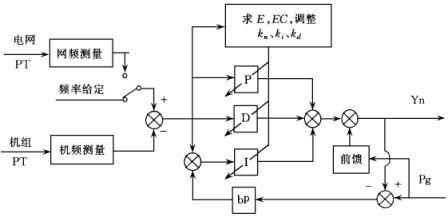
圖3 PID 調(diào)節(jié)器原理框圖
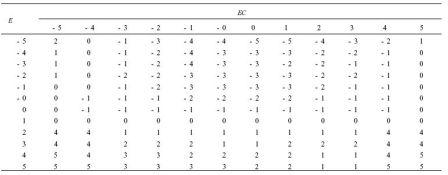
表2 qI 調(diào)整表
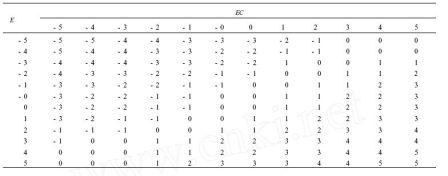
表3 qD 調(diào)整表
式中: Cp �、CI ���、CD 為比例系數(shù); qp �����、qI �����、qD 為修正系數(shù)����。
在qp , qI , qD 的規(guī)則表建好后, 只需根據(jù)偏差和偏差變化率的大小, 通過查表就可獲得當(dāng)前的kp , kI, kD , 和kD 通過PID 運(yùn)算規(guī)則控制輸出。由于水輪機(jī)調(diào)速器的參數(shù)一般都較小, 因此上述表中的值可乘一比例系數(shù), 可防止PID 參數(shù)變化太大而引起系統(tǒng)的不穩(wěn)定��。
3 電站試驗(yàn)
基于可編程計(jì)算機(jī)控制器的調(diào)速器2001 年5 月安裝于甘肅張掖龍渠三級電站2 號機(jī)上, 并對該調(diào)節(jié)系統(tǒng)進(jìn)行了全面的靜態(tài)和動態(tài)特性試驗(yàn), 試驗(yàn)表明其性能指標(biāo)滿足或優(yōu)于國標(biāo)GB/T9652.1 - 1997的要求, 其主要特性試驗(yàn)結(jié)果如下:
(1) 調(diào)速器轉(zhuǎn)速死區(qū)小于0.04 %;
(2) 空載時(shí)擾動量取8 % , 選參數(shù)Kp = 1.7 , KI = 0.32 , KD = 1.7 作為智能PID 初值, 擾動后調(diào)節(jié)時(shí)間比較短, 接力器擺動一次, 而且機(jī)頻超調(diào)小�����。見圖4��。
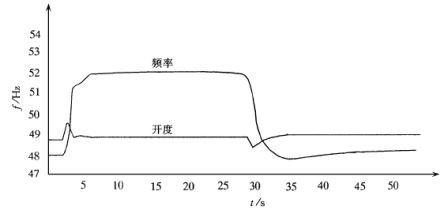
圖4 空載頻率階躍擾動試驗(yàn)過渡過程曲線
(3) 甩25 %額定負(fù)荷, 接力器不動時(shí)間為0.16s��。見圖5����。
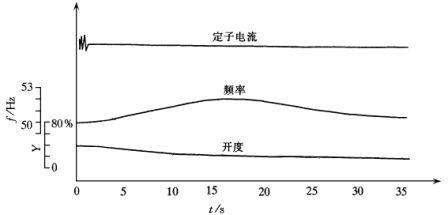
圖5 甩25 %負(fù)荷800kW試驗(yàn)過渡過程曲線
(4) 甩100 %額定負(fù)荷時(shí), 轉(zhuǎn)速最大上升為額定轉(zhuǎn)速的118 % , 調(diào)節(jié)時(shí)間為20s��。見圖6

圖6 甩100 %負(fù)荷3300kW試驗(yàn)過渡過程曲線
試驗(yàn)后調(diào)速器即投入運(yùn)行, 運(yùn)行狀況良好。此后又有數(shù)臺先后在四川飛羅電站�、福建建甌馬鞍電站、陜西石泉鵝項(xiàng)頸電站投入運(yùn)行, 均運(yùn)行穩(wěn)定, 且具有很高的可靠性, 獲得了用戶的好評����。
4 結(jié)語
本文提出的基于可編程計(jì)算機(jī)控制器的步進(jìn)式調(diào)速器具有如下特點(diǎn): (1) 測頻裝置整形電路和可編程計(jì)算機(jī)控制器配以適當(dāng)軟件完成測頻功能, 并取代單片機(jī)及PLC 測頻裝置, 直接測量頻率信號的當(dāng)前周期, 提高了系統(tǒng)的可靠性及動態(tài)品質(zhì)。(2) 采用可編程計(jì)算機(jī)控制器PCC 作為調(diào)速器電氣部分的硬件, 其平均無故障率達(dá)50 萬h , 大大提高了微機(jī)調(diào)速器電氣部分的可靠性�。(3) 采用可編程計(jì)算機(jī)控制器PCC 較之傳統(tǒng)的可編程邏輯控制器PLC 具有以下優(yōu)點(diǎn): 采用多CPU 并行處理, 從而使主CPU 的資源得到了合理使用, 同時(shí)又最大限度地提高了整個(gè)系統(tǒng)的速度; 采用多任務(wù)分時(shí)操作系統(tǒng), 從而使整個(gè)系統(tǒng)得到優(yōu)化且具有較好的實(shí)時(shí)性; 引進(jìn)了高級語言編程技術(shù), 使編程更方便, 更利于描述復(fù)雜的控制思想。(4) 基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID 控制策略, 實(shí)現(xiàn)水力機(jī)組所有工況的最佳控制, 其動態(tài)特性有了明顯改善���。(5) 以高可靠步進(jìn)式電液隨動系統(tǒng)為功率放大單元, 徹底解決了電液轉(zhuǎn)換器堵塞發(fā)卡�、漂移及對油質(zhì)的過高要求和較大的漏油量等問題, 從而提高了調(diào)速器整機(jī)的可靠性�����。因此, 該調(diào)速器一經(jīng)推出就受到用戶的好評, 有著廣闊的應(yīng)用前景�。
參 考 文 獻(xiàn):
[ 1 ] 趙坤耀. 水輪機(jī)調(diào)速器發(fā)展綜述[J ] . 水力發(fā)電學(xué)報(bào), 1996 (1) .
[ 2 ] 齊蓉. 新一代可編程計(jì)算機(jī)控制器技術(shù)[M] . 西安: 西北工業(yè)大學(xué)出版社, 2000 , 3.
[ 3 ] 南海鵬, 等. 基于可編程計(jì)算機(jī)控制器的水輪機(jī)調(diào)速器[J ] . 中國農(nóng)村水利水電,2001 , 5.
[ 4 ] 章衛(wèi)國, 等. 模糊控制理論與應(yīng)用[M] . 西安: 西北工業(yè)大學(xué)出版社. 1999 , 10.
[ 5 ] Leonid Reznik , Omar Ghanayem , Anna Bourmistrov. PID plus fuzzy controller structures as a design base for industrial
applications [J ] . Engineering Applications of Artificial Intelligence. 2000 , 13 : 419 - 430
High reliability step by step hydraulic turbine governor based
on programmable computer controller
NAN Hai-peng1 , WANG Tao1 , YU Xiang-yang1
(1. Xi' an University of Technology , Xi' an 710048 , China)
Abstract : A high reliability step by step hydraulic turbine governor based on programmable computer controller (PCC) is developed. Its frequency measurement is realized by PCC intelligent module. The intelligent
Proportion integration differential ( PID) control method based on fuzzy logic is applied. The Governor possesses high measurement accuracy , high control speed and high reliability and verified by operation and tests in hydropower stations.
Key words : hydraulic turbine governor ; programmable computer controller ; intelligent PID
作者簡介: 南海鵬(1963 , 男, 陜西人, 副教授, 研究方向?yàn)樗C(jī)械及自動化) 1 , 王 濤1 , 余向陽1
1 西安理工大學(xué)水電學(xué)院, 陜西西安 710048