摘要: 從速度����、存儲(chǔ)容量�����、編程語(yǔ)言��、接口特性等方面分析了數(shù)字式電液調(diào)速器微機(jī)調(diào)節(jié)器中控制器的選擇原則,并對(duì)微機(jī)調(diào)節(jié)器中較為常用的幾類控制器做了分析比較�����。
關(guān)鍵詞: 水輪調(diào)速器; 數(shù)字式電液調(diào)速器; 微機(jī)調(diào)節(jié)器; 可編程計(jì)算機(jī)控制器
1 數(shù)字式電液調(diào)速器的發(fā)展及特點(diǎn)
隨著微電子技術(shù)的發(fā)展,調(diào)速器的發(fā)展也進(jìn)入了數(shù)字式(微機(jī)) 電液調(diào)速器階段,數(shù)字式電液調(diào)速器習(xí)慣上也稱為微機(jī)調(diào)速器�����。微機(jī)調(diào)速器又從最初的單片機(jī)����、單板機(jī)微機(jī)調(diào)速器發(fā)展到現(xiàn)在的工業(yè)控制計(jì)算機(jī)(IPC) 調(diào)速器��、可編程控制器(PLC) 調(diào)速器��、可編程計(jì)算機(jī)控制器(PCC) 調(diào)速器���。所謂IPC ,PLC ,PCC 調(diào)速器是指電液調(diào)速器的微機(jī)調(diào)節(jié)器分別以IPC ,PLC ,PCC 為核心構(gòu)成(見圖1) ��。
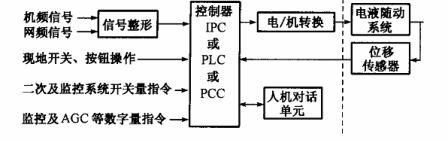
圖1 數(shù)字式( 微機(jī)) 電液調(diào)速器的構(gòu)成
微機(jī)調(diào)速器由微機(jī)調(diào)節(jié)器及電液隨動(dòng)系統(tǒng)構(gòu)成��。微機(jī)調(diào)節(jié)器以高可靠性的控制器為核心,采集頻率信號(hào)及控制信號(hào),用計(jì)算機(jī)程序?qū)崿F(xiàn)復(fù)雜的運(yùn)算及控制功能,并以一定方式輸出控制結(jié)果作為電液隨動(dòng)系統(tǒng)的輸入�����。微機(jī)調(diào)速器具有可靠性高�、外圍電路少����、編程方便、功能擴(kuò)展性好等特點(diǎn)[1] ����。
2 微機(jī)調(diào)節(jié)器中控制器的選擇
從圖1 可見,微機(jī)調(diào)節(jié)器的核心在于控制器,控制器完成調(diào)速器的信號(hào)采集、數(shù)據(jù)運(yùn)算�、控制規(guī)律實(shí)現(xiàn)、運(yùn)行狀態(tài)切換�����、其他附加功能及控制值輸出等功能�。調(diào)速器的功能基本由控制器實(shí)現(xiàn),電液隨動(dòng)系統(tǒng)主要是執(zhí)行機(jī)構(gòu)。因此,在設(shè)計(jì)調(diào)速器微機(jī)調(diào)節(jié)器時(shí),選擇合適的控制器很重要�����。目前市場(chǎng)上的控制器種類很多,如單片機(jī)、單板機(jī)�、PLC、PCC��、IPC等,但由于調(diào)速器是應(yīng)用于工業(yè)現(xiàn)場(chǎng)的設(shè)備,對(duì)可靠性要求很高�。因此,選擇微機(jī)調(diào)節(jié)器的控制器的一條重要原則是,要選用適合于工業(yè)現(xiàn)場(chǎng)使用的抗干擾能力強(qiáng)、可靠性高���、選擇余地大����、操作維護(hù)方便的控制器�����。目前滿足此原則的主要是PLC , PCC ,IPC 等幾類控制器,此外,還應(yīng)從以下幾方面考慮��。
2. 1 控制器的速度
所謂控制器的速度, 包含2 層含義: 控制器CPU 的位數(shù)和控制器中用戶程序的掃描周期���。
控制器CPU 的位數(shù)反映到調(diào)速器中主要體現(xiàn)在控制精度上,按國(guó)標(biāo)要求調(diào)速器轉(zhuǎn)速死區(qū)小于
0.02 % ,而在用最大差值法計(jì)算轉(zhuǎn)速死區(qū)時(shí),最大相對(duì)差值還要乘以bp��;假設(shè)bp = 10 % ,則要求最大相對(duì)差值小于0. 1 %���。以16 位機(jī)的控制器為例,假設(shè)整數(shù)運(yùn)算中,以整數(shù)25000 表示開度為100 % ,那么,開度分辨率為0.004 % ,其值遠(yuǎn)遠(yuǎn)小于0.1 % ,可見,16 位機(jī)足以滿足要求���。況且,即使是16 位機(jī),由于雙字算法的存在,也能實(shí)現(xiàn)32 位運(yùn)算,從這個(gè)意義上說(shuō),即使是8 位機(jī)應(yīng)用于調(diào)速器也是滿足要求的,因?yàn)? 位機(jī)中也有字節(jié)運(yùn)算、字運(yùn)算及雙字運(yùn)算��。因此,32 位機(jī)��、16 位機(jī)甚至8 位機(jī)均可應(yīng)用于調(diào)速器并滿足性能要求����。
關(guān)于控制器中用戶程序的掃描周期,從以下幾個(gè)方面考慮:
a. 頻率信號(hào)采樣周期�����。從調(diào)速器系統(tǒng)結(jié)構(gòu)框圖(見圖2) 可見,機(jī)組頻率信號(hào)是調(diào)速器系統(tǒng)的輸入���;調(diào)速器根據(jù)采集到的頻率信號(hào),算出頻差,針對(duì)頻差進(jìn)行PID 運(yùn)算,運(yùn)算的結(jié)果即調(diào)節(jié)器的輸出���;調(diào)節(jié)器的輸出再以一定的方式控制機(jī)械液壓系統(tǒng),機(jī)械液壓系統(tǒng)再去操作導(dǎo)水葉,控制其開度。因此,調(diào)節(jié)器的輸出是與頻率的變化密切相關(guān)的�。目前,調(diào)速器普遍采用的測(cè)頻方法是測(cè)周期法[2] ,當(dāng)被測(cè)頻率為50Hz 時(shí),最小采樣周期為20ms ,即被測(cè)頻率信號(hào)的更新周期為20ms。由于頻率的采樣周期為20ms 左右,用戶程序的掃描周期一般應(yīng)比頻率信號(hào)采樣周期小,但小到一定程度后意義就不大了。

圖2 調(diào)速器系統(tǒng)結(jié)構(gòu)
b. 水輪發(fā)電機(jī)組和電液轉(zhuǎn)換器(或電/ 機(jī)轉(zhuǎn)換裝置) 的截止頻率��。水輪發(fā)電機(jī)組的截止頻率一般為0.1 Hz~1.0 Hz ,調(diào)速器中電液轉(zhuǎn)換器的截止頻率一般為3Hz~10Hz[1] �����。根據(jù)控制理論的香農(nóng)采樣定理,"要從采樣信號(hào)中完全復(fù)現(xiàn)出采樣前的連續(xù)信號(hào),必須滿足采樣頻率大于或等于2 倍的采樣器輸入連續(xù)信號(hào)頻譜中的最高頻率",將此定理應(yīng)用于調(diào)速器系統(tǒng),若采用2 倍于水輪發(fā)電機(jī)組和電液轉(zhuǎn)換器截止頻率的采樣頻率,即6 Hz~20 Hz ,就能滿足香農(nóng)采樣定理,此時(shí)調(diào)節(jié)器采樣周期為167 ms~50 ms���。
c. 調(diào)速器不動(dòng)時(shí)間����。國(guó)標(biāo)要求調(diào)速器的不動(dòng)時(shí)間小于0.2 s�。在調(diào)速器系統(tǒng)中,不動(dòng)時(shí)間主要由3 部分組成:2 倍的調(diào)節(jié)器用戶程序掃描周期(在最差的情況下) ,導(dǎo)葉位置輸出D/ A 轉(zhuǎn)換時(shí)間,調(diào)速器機(jī)械液壓系統(tǒng)主配壓閥搭迭量、死區(qū)等�。按照這種構(gòu)成,程序掃描周期部分小于整個(gè)不動(dòng)時(shí)間的1/ 4是可行的,經(jīng)計(jì)算,不動(dòng)時(shí)間的指標(biāo)要求程序掃描周期小于25ms。
綜上所述,控制器用戶程序掃描周期以5ms~15ms 為宜��。
2. 2 I/ O 及存儲(chǔ)容量
對(duì)應(yīng)用于調(diào)速器系統(tǒng)的控制器而言,由于調(diào)速器基本功能固定,用戶程序功能單一集中,并且水輪機(jī)調(diào)速器程序已經(jīng)基本實(shí)現(xiàn)標(biāo)準(zhǔn)化,對(duì)于不同電站不同類型的調(diào)速器其程序的更改一般為10 %左右���。到目前為止,我們?cè)谒啓C(jī)數(shù)字式電液調(diào)速器中使用過(guò)的控制器有不同國(guó)家����、不同公司��、不同系列的多達(dá)8 種PLC 產(chǎn)品。根據(jù)經(jīng)驗(yàn),對(duì)數(shù)字量的I/ O 點(diǎn)數(shù)�����、模擬量的I/ O 點(diǎn)數(shù)�、程序存儲(chǔ)容量、數(shù)據(jù)存儲(chǔ)容量進(jìn)行統(tǒng)計(jì),如表1 所示(表中的統(tǒng)計(jì)數(shù)據(jù)已留有充分的裕量) �����。
表1 應(yīng)用于調(diào)速器中PLC的I/ O點(diǎn)數(shù)及存儲(chǔ)容量統(tǒng)計(jì)

2. 3 編程語(yǔ)言
目前市場(chǎng)上比較通用的控制器,其編程語(yǔ)言不外乎C��、BASIC 等高級(jí)語(yǔ)言,以及梯形圖�、功能塊、語(yǔ)句表等幾種語(yǔ)言��。一般認(rèn)為,高級(jí)語(yǔ)言功能強(qiáng)大,編程靈活,能實(shí)現(xiàn)較復(fù)雜的算法,但高級(jí)語(yǔ)言編制起來(lái)較復(fù)雜,對(duì)現(xiàn)場(chǎng)的工程技術(shù)人員來(lái)說(shuō),掌握起來(lái)有一定難度,不利于維護(hù)�����。因此在調(diào)速器領(lǐng)域,大概有80 %~90 %的編程使用的是梯形圖語(yǔ)言����。
梯形圖語(yǔ)言最初主要用于PLC ,其后隨著電子技術(shù)的發(fā)展, IPC��、PCC 等均有梯形圖語(yǔ)言可供選擇。而梯形圖語(yǔ)言本身也已經(jīng)不再僅僅是邏輯順序控制,隨著PLC 的發(fā)展,梯形圖語(yǔ)言也有了邏輯運(yùn)算�����、浮點(diǎn)數(shù)運(yùn)算��、比較運(yùn)算,高速計(jì)數(shù)功能���、PID 運(yùn)算功能塊���、PWM 運(yùn)算、變量尋址���、指針運(yùn)算等�。梯形圖語(yǔ)言簡(jiǎn)單明了,邏輯清晰,容易掌握,調(diào)試方便,而且功能強(qiáng)大,現(xiàn)在,有些PLC 的梯形圖編程系統(tǒng)已經(jīng)實(shí)現(xiàn)了程序結(jié)構(gòu)化��、標(biāo)準(zhǔn)化,一些功能已由PLC操作系統(tǒng)集成為功能塊,只需在梯形圖程序中調(diào)用,如PID 控制功能塊���。
而對(duì)調(diào)速器而言,由于其程序已經(jīng)基本標(biāo)準(zhǔn)化,應(yīng)用于某一具體用戶的調(diào)速器程序基本是由90%
的基本程序加10 %的用戶特定程序構(gòu)成,可見,對(duì)每個(gè)調(diào)速器的程序工作量相對(duì)而言并不大���。例如,
用梯形圖語(yǔ)言編制某調(diào)速器的用戶特定程序,一個(gè)較熟練的技術(shù)人員大概只需5h~8h 即可完成。
因此,從應(yīng)用角度講,高級(jí)語(yǔ)言����、梯形圖語(yǔ)言����、功能塊語(yǔ)言�����、語(yǔ)句表語(yǔ)言均能較好地實(shí)現(xiàn)調(diào)速器的功能,但從實(shí)用角度講,梯形圖語(yǔ)言更利于用戶技術(shù)人員閱讀調(diào)速器程序,從而有利于設(shè)備維護(hù)�����。
2. 4 接口特性
在調(diào)速器系統(tǒng)中,其微機(jī)調(diào)節(jié)器的控制器的基本配置包括CPU 模塊�����、開關(guān)量輸入/ 輸出模塊(也有的開關(guān)量輸入/ 輸出就集成在CPU 模塊上) ��、模擬量輸入/ 輸出模塊���。除此之外,在有些調(diào)速器系統(tǒng)中還可能用到定位模塊(高速脈沖輸出模塊) 、高速計(jì)數(shù)模塊�、通信模塊(根據(jù)通信對(duì)象的不同,有可能要求串行的RS-232 ,RS-422 或RS-485 口,以及以太網(wǎng)通信處理器、PROFIBUS 通信處理器等) ��、中斷模塊、觸摸式圖形操作終端等��。因此,選擇控制器時(shí)應(yīng)在弄清楚調(diào)速器系統(tǒng)構(gòu)成的基礎(chǔ)上仔細(xì)考慮其可選擴(kuò)展模塊是否能滿足調(diào)速器系統(tǒng)的要求�。例如,目前有的調(diào)速器采用交流伺服電機(jī)位置環(huán)實(shí)現(xiàn)電/ 機(jī)轉(zhuǎn)換,則需要考慮所選控制器是否有合適的高速脈沖輸出模塊(就是常說(shuō)的定位模塊) 可供選擇;又如,弄清楚調(diào)速器與監(jiān)控系統(tǒng)等的通信接口后,則需要配置相應(yīng)的通信模塊。
在調(diào)速器中,測(cè)頻環(huán)節(jié)極其重要,在確定測(cè)頻方式時(shí),要考慮是否有相應(yīng)的接口模塊可供選擇�。目前在調(diào)速器中,測(cè)頻的實(shí)現(xiàn)主要有2 類: ①用單片機(jī)測(cè)出頻率再送至控制器,若是采用并行方式發(fā)送頻率,就要考慮控制器中被占用的I/ O 點(diǎn)數(shù);若是用串行方式發(fā)送頻率,則要考慮串行通信口的擴(kuò)展。②PLC 內(nèi)測(cè)頻,包括2 種方式:一種是采用擴(kuò)展的高速計(jì)數(shù)模塊,此時(shí)要考慮高速計(jì)數(shù)模塊的計(jì)數(shù)頻率是否滿足測(cè)頻精度的要求;另一種是不采用擴(kuò)展的高速計(jì)數(shù)模塊,而利用控制器內(nèi)部的高速計(jì)數(shù)功能及中斷功能,采用靜態(tài)頻率及動(dòng)態(tài)頻率的概念[3]將速動(dòng)性與高精度較好地結(jié)合在一起,此時(shí)要考慮的是控制器CPU 的高速計(jì)數(shù)功能的計(jì)數(shù)頻率����。
2. 5 控制器選擇空間
水輪機(jī)調(diào)速器是水電站中非常重要的輔機(jī)設(shè)備,它直接控制水輪發(fā)電機(jī)組的運(yùn)行,因此對(duì)可靠性要求很高,其微機(jī)調(diào)節(jié)器的控制器應(yīng)是大批量生產(chǎn)的可靠性高、技術(shù)先進(jìn)的成熟產(chǎn)品��。
現(xiàn)代化的水電站中,自動(dòng)控制裝置已被廣泛使用,如閘門�����、水車���、油壓裝置�、高低壓氣機(jī)����、勵(lì)磁、集水井等,這些自動(dòng)控制裝置也要用控制器���。同一個(gè)電站中,用戶往往希望選擇相同系列的控制器構(gòu)成自動(dòng)控制裝置,以便于培訓(xùn)��、維護(hù)及備品備件供應(yīng)�����。因此,應(yīng)用于調(diào)速器中的控制器應(yīng)能考慮與電站其他設(shè)備的匹配,以滿足不同用戶的需求,這就要求控制器種類有廣泛的選擇空間,應(yīng)該是在各領(lǐng)域中應(yīng)用廣泛���、性能成熟的產(chǎn)品�。
2. 6 關(guān)于分時(shí)多任務(wù)處理
所謂分時(shí)多任務(wù)處理,是指計(jì)算機(jī)采取按照時(shí)間片的輪換對(duì)多個(gè)任務(wù)串行執(zhí)行的方式,其本質(zhì)是分時(shí)串行�。
如果確實(shí)有必要對(duì)多個(gè)獨(dú)立的任務(wù)進(jìn)行處理,那么采用多個(gè)CPU 分別處理的方式,無(wú)論從成本、可靠性���、可維護(hù)性�����、模塊化程度上都更加適合工程應(yīng)用��。如果這個(gè)多任務(wù)的執(zhí)行過(guò)程需要通信,那么,在CPU 之間的通信(以太網(wǎng)�����、現(xiàn)場(chǎng)總線等) 也可以完全達(dá)到這一目的�。如日本三菱的Q 系列PLC ,可以實(shí)現(xiàn)將多個(gè)CPU 安裝在同一主基板上,控制系統(tǒng)中的各個(gè)I/ O��、智能模塊有各自的CPU 分別管理的多CPU 系統(tǒng),CPU 間的通信可以分別通過(guò)自動(dòng)刷新定期執(zhí)行其通信功能的循環(huán)通信和通過(guò)專用命令隨機(jī)進(jìn)行的瞬時(shí)通信,多CPU 系統(tǒng)將原CPU 單獨(dú)執(zhí)行的順序控制���、數(shù)據(jù)處理等分散到多臺(tái)專用的CPU中,使整個(gè)系統(tǒng)更高速化和高性能化���。
對(duì)于調(diào)速器而言,控制過(guò)程已經(jīng)非常成熟、規(guī)范,不存在需要將控制任務(wù)分成若干小任務(wù)并行處理的需求���。實(shí)時(shí)多任務(wù)機(jī)制的采用應(yīng)該說(shuō)對(duì)改善調(diào)速器性能并無(wú)明顯益處���。
3 主要控制器簡(jiǎn)介
前文已提到,應(yīng)用于微機(jī)調(diào)節(jié)器中的控制器主要是IPC ,PLC ,PCC 等3 類。
IPC 即工控機(jī),它由計(jì)算機(jī)和過(guò)程輸入/ 輸出通道兩大部分組成�����。IPC 功能強(qiáng)大,界面友好,但利用IPC 構(gòu)成控制系統(tǒng)開發(fā)周期較長(zhǎng)�����、現(xiàn)場(chǎng)布線不夠靈活�����、安裝體積大和擴(kuò)展性差,而且IPC 模式主要是通過(guò)接口板轉(zhuǎn)換各種信號(hào),干擾也是一個(gè)很大的問(wèn)題。由于這些問(wèn)題的存在, IPC 在調(diào)速器這一控制領(lǐng)域應(yīng)用并不十分廣泛,目前已投入現(xiàn)場(chǎng)運(yùn)行的IPC 調(diào)速器(包括企業(yè)自行設(shè)計(jì)的IPC) 約200 臺(tái)���。IPC 在電力系統(tǒng)其他領(lǐng)域的應(yīng)用還是很廣泛的,如電廠計(jì)算機(jī)監(jiān)控系統(tǒng)����、變電站計(jì)算機(jī)監(jiān)控系統(tǒng)�����、調(diào)度中心工作站等����。目前在自動(dòng)控制領(lǐng)域應(yīng)用比較廣泛的IPC 品牌有臺(tái)灣研華、美國(guó)Intel ��、德國(guó)西門子���、臺(tái)灣研祥等�����。
PLC 由于其初期在功能上只能進(jìn)行邏輯控制,因此被稱為可編程邏輯控制器,隨著微電子技術(shù)的發(fā)展,PLC 的功能也不斷發(fā)展,具有邏輯運(yùn)算���、順序控制���、定時(shí)�����、計(jì)數(shù)�、算術(shù)運(yùn)算、中斷��、比較等操作指令,幾乎能實(shí)現(xiàn)控制領(lǐng)域的所有控制功能��。因此PLC發(fā)展到現(xiàn)在, 實(shí)際上已成為功能完善的控制器,NEMA在1980 年將其正式命名為可編程控制器,即PC ,不過(guò)由于習(xí)慣,很多場(chǎng)合下還沿用PLC 的叫法�。PLC 的編程語(yǔ)言為類似于繼電器控制線路的梯形圖,易于被電氣技術(shù)人員接受[4] 。至20 世紀(jì)70 年代,全世界有200 多個(gè)廠家生產(chǎn)了400 多個(gè)品種的PLC 產(chǎn)品及其網(wǎng)絡(luò)產(chǎn)品,在全世界的自動(dòng)化控制裝置中, PLC 的產(chǎn)量���、銷量���、用量位居榜首[1] ,主要品牌及系列有日本三菱FX 系列、AnS 系列����、Q 系列等,日本Omron ,德國(guó)西門子S7 系列、S5 系列,德國(guó)GE ,美國(guó)AB ,法國(guó)Modicon TSX 系列、昆騰系列,美國(guó)施奈德等�����。鑒于PLC 的標(biāo)準(zhǔn)化�����、系列化�����、高可靠性�、應(yīng)用廣泛和技術(shù)更新等優(yōu)點(diǎn),國(guó)際電工委員會(huì)(IEC) 從1992 年開始已連續(xù)發(fā)布了IEC 61131-1~I(xiàn)EC 61131-5 關(guān)于PLC 的5 項(xiàng)標(biāo)準(zhǔn),對(duì)其總論、裝置要求和試驗(yàn)��、編程語(yǔ)言�、用戶指南和技術(shù)條件等制定了標(biāo)準(zhǔn)。
華中科技大學(xué)在1993 年率先提出并完成了_PLC 調(diào)速器的開發(fā)和生產(chǎn)�����。PLC 調(diào)速器應(yīng)用于現(xiàn)場(chǎng)后,因其安全�、可靠、操作方便而得到用戶好評(píng),并迅速得以推廣���。目前,以PLC 為核心構(gòu)成微機(jī)調(diào)節(jié)器的微機(jī)調(diào)速器已成為我國(guó)當(dāng)前水輪機(jī)微機(jī)調(diào)速器的主導(dǎo)產(chǎn)品,目前已應(yīng)用于現(xiàn)場(chǎng)的大概有900 余臺(tái)��。
PCC 是1994 年由貝加萊提出的工業(yè)控制的一種新概念,其實(shí)質(zhì)是一種在軟�、硬件技術(shù)方面進(jìn)一步發(fā)展的新一代可編程控制器產(chǎn)品,與常規(guī)PLC 相比,PCC 最大的特點(diǎn)在于其類似于大型計(jì)算機(jī)的分時(shí)多任務(wù)操作系統(tǒng)和多樣化的應(yīng)用軟件的設(shè)計(jì)。PCC 與PLC 一樣能處理開關(guān)量�、模擬量并進(jìn)行回路調(diào)節(jié),PCC 可以用梯形圖、語(yǔ)句表編程,也可以用高級(jí)語(yǔ)言編程,具備大型機(jī)的分析運(yùn)算能力[5] ����。據(jù)初步了解,PCC 目前在世界范圍內(nèi)只有貝加萊一家公司生產(chǎn),有大型的2010 系列����、小型的2003 系列及中型的2005 系列。目前,已有兩三家調(diào)速器生產(chǎn)廠家研制成功以PCC 為核心構(gòu)成微機(jī)調(diào)速器的微機(jī)調(diào)節(jié)器,而且有近50 臺(tái)運(yùn)行于現(xiàn)場(chǎng)���。PCC 目前主要應(yīng)用于中小型調(diào)速器��。
可見, IPC , PLC , PCC 其實(shí)質(zhì)均是工業(yè)控制計(jì)算機(jī),三者之間互相滲透,取長(zhǎng)補(bǔ)短,有進(jìn)一步融合的趨勢(shì)�����。如研華新近推出的ADAM-5510 PC-based PLC 就是一種融入PC 技術(shù)的PLC ,又如現(xiàn)在許多工控機(jī)都提供梯形圖編程語(yǔ)言�����。
表2 列出幾種IPC ,PLC ,PCC 的性能數(shù)據(jù)���。
表2 幾種IPC, PLC, PCC的部分性能數(shù)據(jù)
4 結(jié)語(yǔ)
a. 微機(jī)調(diào)節(jié)器中控制器的選擇應(yīng)從滿足調(diào)速器的性能�����、功能出發(fā),選擇可靠性高��、生產(chǎn)批量大�、產(chǎn)品多以及能滿足某些特殊要求的成熟產(chǎn)品����。
b. IPC ,PLC ,PCC 從廣義上看都是工業(yè)控制計(jì)算機(jī),用做微機(jī)調(diào)節(jié)器的控制器都可以滿足調(diào)速器的性能及功能要求, PCC 實(shí)際上就是一種PLC ,但PCC 和IPC 更適用于數(shù)據(jù)采集和小型監(jiān)控系統(tǒng)。
c. 隨著微機(jī)技術(shù)�����、通信技術(shù)及大規(guī)模集成電路技術(shù)的發(fā)展,將會(huì)出現(xiàn)性能優(yōu)良���、可靠性高�����、性價(jià)比更高的控制器,從事調(diào)速器工作的技術(shù)人員應(yīng)緊跟技術(shù)發(fā)展,研制出品質(zhì)更好的調(diào)速器產(chǎn)品���。
參考文獻(xiàn)
1 魏守平. 現(xiàn)代水輪機(jī)調(diào)節(jié)技術(shù). 武漢:華中科技大學(xué)出版社,2002
2 魏守平,余 嵐,劉昌玉,等. 可編程控制器調(diào)速器. 武漢鋼鐵學(xué)院學(xué)報(bào),1994 ,17(13):323~330
3 魏守平,羅 萍. 水輪機(jī)調(diào)速器的PLC 測(cè)頻方法. 水電能源科學(xué),2000 (4) :31~33
4 鐘肇新,彭 侃. 可編程控制器原理及應(yīng)用. 廣州:華南理工大學(xué)出版社,1999
5 齊 蓉. 可編程計(jì)算機(jī)控制器原理及應(yīng)用. 西安:西北工業(yè)大學(xué)出版社,2002
作者:魏守平(1939 ,男,教授,博士生導(dǎo)師,主要從事水輪機(jī)數(shù)字式電液調(diào)速器和水電廠計(jì)算機(jī)控制設(shè)備的研究和開發(fā)工作���。E-mail : spwei @public. wh. hb. cn)1 , 羅 萍2
(1. 華中科技大學(xué)水電與數(shù)字化工程學(xué)院, 湖北省武漢市430074)
(2. 武漢星聯(lián)控制系統(tǒng)工程有限責(zé)任公司, 湖北省武漢市430070)