[摘 要] 提出了一種基于PCC 的微機(jī)調(diào)節(jié)器和強(qiáng)驅(qū)動(dòng)�����、力反饋集成式電液隨動(dòng)系統(tǒng)構(gòu)成的新型調(diào)速器��。用PCC 的高級(jí)語言開發(fā)實(shí)時(shí)多任務(wù)調(diào)控軟件�,編程簡潔、快速���,更適合調(diào)速器實(shí)時(shí)控制需要��。強(qiáng)驅(qū)動(dòng)���、力反饋集成式電液隨動(dòng)系統(tǒng)���,結(jié)構(gòu)簡單,工作可靠����,抗油污能力強(qiáng)。二者的結(jié)合��,使整個(gè)調(diào)速器性能大大提高?�,F(xiàn)場運(yùn)行表明��,該新型調(diào)速器具有良好的靜�、動(dòng)態(tài)特性和很高的可靠性�。
[關(guān)鍵詞] 水輪機(jī)調(diào)速器;PCC�����;電液隨動(dòng)系統(tǒng)�����;硬件;軟件
1 引言
水輪機(jī)調(diào)速器是水電站最重要的自動(dòng)控制設(shè)備之一���,其運(yùn)行的好壞直接影響著機(jī)組運(yùn)行可靠性和電能質(zhì)量?�,F(xiàn)代水輪機(jī)調(diào)速器的模式一般為電子調(diào)節(jié)器+電液隨動(dòng)系統(tǒng)[1]�����。目前��,電子調(diào)節(jié)器主要有基于單片機(jī)�、工業(yè)控制機(jī)(IPC)和可編程邏輯控制器(PLC)等三種類型�。基于單片機(jī)的調(diào)速器�����,其硬件多為自行設(shè)計(jì)����,硬件上受到CPU、內(nèi)存容量及I/O 接口的限制���,其通用性��、兼容性和擴(kuò)展性相當(dāng)差����。近幾年來,PLC 調(diào)速器以其高可靠性在水電站得到廣泛的應(yīng)用�����,但PLC 由于其本身性能的限制�,解決不了水輪機(jī)調(diào)速器頻率測量的精度和實(shí)時(shí)性的問題,因而市場上大多數(shù)的PLC調(diào)速器靠另加一單片機(jī)完成測頻任務(wù)�����。單片機(jī)測頻后向PLC 傳送頻率值時(shí)����,易受外界信號(hào)干擾���,從而降低了PLC 調(diào)速器整機(jī)可靠性�。另外��,傳統(tǒng)的電液隨動(dòng)系統(tǒng)普遍存在抗油污能力差�,系統(tǒng)結(jié)構(gòu)復(fù)雜���,體積龐大,標(biāo)準(zhǔn)化集成度不高����,可靠性較低等問題。針對(duì)以上問題����,提出了基于可編程計(jì)算機(jī)控制(PCC)的微機(jī)調(diào)節(jié)器和強(qiáng)驅(qū)動(dòng)、力反饋集成式電液隨動(dòng)系統(tǒng)構(gòu)成的新型調(diào)速器��。
可編程計(jì)算機(jī)控制(PCC)是由奧地利B&R 首先在工控界提出的一個(gè)全新概念��,將計(jì)算機(jī)的多任務(wù)分時(shí)操作系統(tǒng)及高級(jí)編程語言引入可編程計(jì)算機(jī)控制器����,其性能比常規(guī)PLC 有較大的增強(qiáng)和提高[3]。
強(qiáng)驅(qū)動(dòng)����、力反饋集成式電液隨動(dòng)系統(tǒng)采用最新專利技術(shù),結(jié)構(gòu)簡單����,工作可靠��,功能完善����,抗油污能力強(qiáng)��,技術(shù)指標(biāo)高[2]�。
2 整體結(jié)構(gòu)
PCC 強(qiáng)驅(qū)動(dòng)、力反饋集成式水輪機(jī)調(diào)速器的整體結(jié)構(gòu)如圖1 所示��。
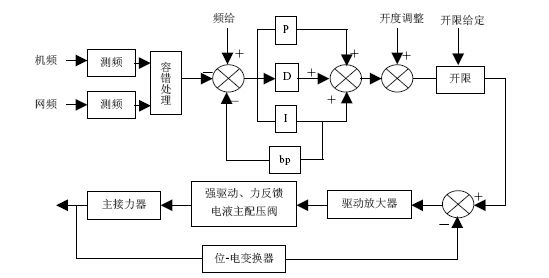
圖1 PCC 強(qiáng)驅(qū)動(dòng)���、力反饋集成式水輪機(jī)調(diào)速器的整體結(jié)構(gòu)
測頻子程序分別將機(jī)頻和網(wǎng)頻變換為數(shù)字量����,經(jīng)容錯(cuò)邏輯子程序判斷后與頻率給定值進(jìn)行比較�����,其差值經(jīng)PID 子程序運(yùn)算后與調(diào)整值相加����,再經(jīng)開限子程序限制后送至驅(qū)動(dòng)放大器,驅(qū)動(dòng)放大器再將由開限子程序送來的信號(hào)(電氣開度信號(hào))與由主接力器位-電變換器送來的導(dǎo)葉反饋信號(hào)(反映主接力器實(shí)際位移即導(dǎo)葉實(shí)際開度的電信號(hào))的差值進(jìn)行放大����,其輸出的功率信號(hào)去控制強(qiáng)驅(qū)動(dòng)、力反饋集成式電液主配壓閥��。
3 PCC 強(qiáng)驅(qū)動(dòng)�����、力反饋集成式水輪機(jī)調(diào)速器硬件設(shè)計(jì)
3.1 PCC 硬件配置
PCC 強(qiáng)驅(qū)動(dòng)�、力反饋集成式水輪機(jī)調(diào)速器硬件配置如圖2所示。該調(diào)速器以B&R2003 系列為硬件主體���。2003 系列裝有一根I/O 總線���,CPU 與電源集成在一起,具有結(jié)構(gòu)緊湊���,集成端子排技術(shù)�,標(biāo)準(zhǔn)現(xiàn)場總線等技術(shù)��。針對(duì)水輪機(jī)調(diào)速器的功能要求��,選用CP430作為調(diào)速器的CPU 模塊,采用2塊CM211-組合模塊作為數(shù)字量���、模擬量的輸入��、輸出模塊�����。其中每一個(gè)CM211-組合模塊有2路模擬量輸入�,2路模擬量輸出��,8路數(shù)字量輸入�,8路數(shù)字量輸出。為了提高測頻的精度和可靠性�����,專門選用高速輸入模塊DI 135作為調(diào)速器測頻輸入模塊���。人機(jī)界面模塊采用B&R PANELWARE���,以可視化全中文界面顯示機(jī)組運(yùn)行狀態(tài)、參數(shù)��。
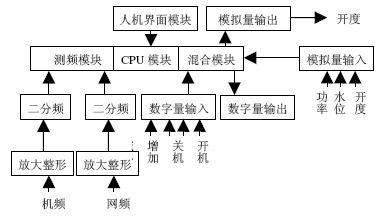
圖2 PCC 強(qiáng)驅(qū)動(dòng)����、力反饋集成式水輪機(jī)調(diào)速器的硬件配置
3.2 強(qiáng)驅(qū)動(dòng)、力反饋集成式電液隨動(dòng)系統(tǒng)[2]
強(qiáng)驅(qū)動(dòng)��、力反饋集成式電液隨動(dòng)系統(tǒng)結(jié)構(gòu)框圖如圖3所示�。
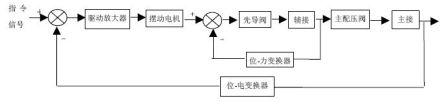
圖3 強(qiáng)驅(qū)動(dòng)、力反饋集成式電液隨動(dòng)系統(tǒng)結(jié)構(gòu)框圖
在圖3中 �,擺動(dòng)電機(jī)將從驅(qū)動(dòng)放大器輸入的功率驅(qū)動(dòng)信號(hào)轉(zhuǎn)變?yōu)橄鄳?yīng)的力去驅(qū)動(dòng)先導(dǎo)閥;先導(dǎo)閥在該力作用下輸出流量����,使輔助接力器產(chǎn)生位移;輔助接力器的位移一方面使主配壓閥輸出流量����,去推動(dòng)主接力器,另一方面通過位移-力變換器將其位移變換為力��,反饋給先導(dǎo)閥�����,促使先導(dǎo)閥復(fù)中���;穩(wěn)定后先導(dǎo)閥所受輔助接力器的反饋力與擺動(dòng)電機(jī)的驅(qū)動(dòng)力大小相等��、方向相反��,從而處于中位�����,輔助接力器及主配壓閥則處于與驅(qū)動(dòng)力成正比的位移位置����。在這個(gè)過程中,先導(dǎo)閥的位移量實(shí)際上很小����,因而可以應(yīng)用輸出位移雖然不大但輸出力卻很大的電-機(jī)轉(zhuǎn)換器,如擺動(dòng)電
機(jī)�、比例電磁鐵、步進(jìn)電機(jī)等�,以產(chǎn)生很強(qiáng)的驅(qū)動(dòng)力,進(jìn)一步提高其抗油污能力���;而輔助接力器及主配壓閥的位移量并不受先導(dǎo)閥位移量的限制��,可以在相當(dāng)大的范圍內(nèi)根據(jù)需要進(jìn)行設(shè)計(jì):因?yàn)樵谕瑯拥尿?qū)動(dòng)力下輔助接力器及主配壓閥所對(duì)應(yīng)的位移量與位移-力變換器(如反饋彈簧)的剛度有關(guān)����,剛度大位移量小,剛度小則位移量大�。
此新型隨動(dòng)系統(tǒng)集電機(jī)轉(zhuǎn)換器�����、液壓先導(dǎo)級(jí)����、輔助接力器、主配壓閥于一體���,結(jié)構(gòu)簡單��,可靠性高�����。采用擺動(dòng)電機(jī)作電-機(jī)轉(zhuǎn)換器可方便地獲得很強(qiáng)驅(qū)動(dòng)力���,從而使得隨動(dòng)系統(tǒng)抗油污能力大大提高。
4 PCC 強(qiáng)驅(qū)動(dòng)�、力反饋集成式水輪機(jī)調(diào)速器軟件設(shè)計(jì)
本研究采用PL2000 高級(jí)語言編程��。PL2000 是一種以文本為基礎(chǔ)的高級(jí)編程語言����,語言的結(jié)構(gòu)符合IEC1131-3 的標(biāo)準(zhǔn)�����,程序可讀性強(qiáng)����,編程效率高。
4.1 頻率測量
將取自電網(wǎng)和機(jī)組電壓互感器的交流電壓信號(hào)經(jīng)過放大整形電路后����,變成同頻率的方波信號(hào),再經(jīng)過二分頻電路后����,送到PCC 的高速數(shù)字量輸入模塊DI135,通過測頻子程序�����,計(jì)算出機(jī)頻和網(wǎng)頻��。顯然,分頻后的信號(hào)的半周期正好等于機(jī)組頻率和電網(wǎng)頻率的周期�。由于DI135 的計(jì)數(shù)頻率為4MHz,設(shè)機(jī)組頻率Fg=50 Hz���,則周期Tg=0.02 s���,測得的周期數(shù)Ng=0.02×4×106=80000��,即分辨率為50Hz/80000=0.000625 Hz����,由此可見,此方法具有很高的分辨率和精度�����。另外��,在軟件設(shè)計(jì)上�,還考慮了測頻失效容錯(cuò)處理,即在機(jī)組并網(wǎng)運(yùn)行狀態(tài)下���,當(dāng)機(jī)組測頻正常時(shí)��,輸出機(jī)頻�����;當(dāng)機(jī)組測頻失效����,電網(wǎng)測頻正常時(shí),輸出網(wǎng)頻�;當(dāng)機(jī)組及電網(wǎng)測頻均失效時(shí),輸出給定頻率����,即額定頻率,從而保證了測頻環(huán)節(jié)的可靠性�。
4.2 改進(jìn)型并聯(lián)PID 調(diào)節(jié)規(guī)律
測頻模塊輸出頻率值經(jīng)容錯(cuò)邏輯子程序判斷后,與頻率給定值進(jìn)行比較��,其差值輸入PID 調(diào)節(jié)器�����,由PID 子程序進(jìn)行相關(guān)運(yùn)算��。本文采用改進(jìn)型并聯(lián)PID調(diào)節(jié)規(guī)律。
并聯(lián)PID 調(diào)節(jié)規(guī)律的傳遞函數(shù)為:

改進(jìn)型并聯(lián)PID 調(diào)節(jié)規(guī)律的傳遞函數(shù)為:

改進(jìn)型并聯(lián)PID 調(diào)節(jié)規(guī)律的傳遞函數(shù)較并聯(lián)PID調(diào)節(jié)規(guī)律的傳遞函數(shù)極點(diǎn)數(shù)少一個(gè)����,所以此改進(jìn)型并聯(lián)PID 調(diào)節(jié)規(guī)律比并聯(lián)PID 調(diào)節(jié)規(guī)律有更大的超前作用。而水輪機(jī)調(diào)節(jié)系統(tǒng)的對(duì)象是非最小相位系統(tǒng)�����,調(diào)節(jié)對(duì)象嚴(yán)重滯后�����,所以要求調(diào)節(jié)規(guī)律有較大的超前作用�����。因此���,用改進(jìn)型并聯(lián)PID 調(diào)節(jié)規(guī)律更合適。
5 現(xiàn)場應(yīng)用
該新型調(diào)速器已于2001 年應(yīng)用于新疆烏蘇市一級(jí)水電站1 號(hào)機(jī)和2 號(hào)機(jī)?���,F(xiàn)場運(yùn)行穩(wěn)定可靠,性能指標(biāo)均滿足或優(yōu)于國標(biāo)GB/T9652.1-1997 的規(guī)定值����,其中主要特性試驗(yàn)結(jié)果如下:
(1) 靜特性試驗(yàn)�����,頻率死區(qū)ix=0.025%
(2) 甩25%額定負(fù)荷時(shí)��,接力器不動(dòng)時(shí)間為0.14 s�。
(3) 甩100%額定負(fù)荷時(shí)�,轉(zhuǎn)速上升為最大額定轉(zhuǎn)速的126%,調(diào)節(jié)時(shí)間為20 s�����,轉(zhuǎn)速波動(dòng)次數(shù)為1 次�����。
6 結(jié)束語
PCC 強(qiáng)驅(qū)動(dòng)���、力反饋集成式水輪機(jī)調(diào)速器是在長期現(xiàn)場實(shí)際運(yùn)行的基礎(chǔ)上開發(fā)出來的����。PCC 調(diào)節(jié)器與強(qiáng)驅(qū)動(dòng)����、力反饋集成式電液隨動(dòng)系統(tǒng)的結(jié)合���,使整個(gè)調(diào)速器性能大大提高,現(xiàn)場運(yùn)行深得用戶好評(píng)�����,是目前水輪機(jī)調(diào)速器發(fā)展的方向����。
[參 考 文 獻(xiàn)]
[1] 魏守平.現(xiàn)代水輪機(jī)調(diào)節(jié)技術(shù)[M].武漢:華中科技大學(xué)出版社,2002 年1 月.
[2] 雷踐仁.新型力反饋先導(dǎo)式方向流量或雙向位移輸出型多級(jí)電液伺服控制元件/組件[P].專利申99115713.3.
[3] 齊蓉.新一代可編程計(jì)算機(jī)控制器技術(shù)[M].西安:西北工業(yè)大學(xué)出版社���,2000 年4 月.
作者: 張曉英(1973-,女�����,四川人,2001 年畢業(yè)于西安理工大學(xué)��,碩士���,研究方向?yàn)殡娏ο到y(tǒng)自動(dòng)化����,講師。)1�����,張明光1�,楊新華1,雷踐仁2
1. 蘭州理工大學(xué)��,甘肅 蘭州 730050��;2. 西安啟元自控技術(shù)研究所��,陜西 西安 710048