摘 要: 提出了一種基于PCC 的高可靠性智能勵(lì)磁調(diào)節(jié)器,它實(shí)現(xiàn)了用可編程計(jì)算機(jī)控制器模塊進(jìn)行同步信號(hào)周期測(cè)
量、移相觸發(fā)脈沖形成,并采用基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID 控制策略,從而使勵(lì)磁調(diào)節(jié)器具有移相精度高����、調(diào)
節(jié)速度快、可靠性高等優(yōu)點(diǎn)���。電站試驗(yàn)及運(yùn)行表明,該調(diào)節(jié)器具有良好的動(dòng)靜態(tài)特性����。
關(guān)鍵詞: 同步發(fā)電機(jī);勵(lì)磁調(diào)節(jié)器;PCC;模糊PID
1 前言
同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器是水電站重要的基礎(chǔ)自動(dòng)化設(shè)備,其質(zhì)量的好壞直接影響到電能品質(zhì)和電站安全及經(jīng)濟(jì)運(yùn)行,同時(shí)也影響電力系統(tǒng)的靜態(tài)穩(wěn)定和動(dòng)態(tài)穩(wěn)定?��,F(xiàn)有同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器一般均采用單片機(jī)或工業(yè)控制計(jì)算機(jī)實(shí)現(xiàn)���?����;趩纹瑱C(jī)的同步發(fā)電機(jī)微機(jī)勵(lì)磁調(diào)節(jié)器,其硬件為自行設(shè)計(jì)制造,且各廠家均為小批量生產(chǎn),故元件檢測(cè)���、篩選、老化處理��、焊接及生產(chǎn)工藝等都受到限制,造成可靠性較低,運(yùn)行中可能出現(xiàn)單片機(jī)死機(jī),使同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器失靈,從而使同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器的可靠性大大降低,嚴(yán)重影響同步發(fā)電機(jī)勵(lì)磁裝置的安全可靠運(yùn)行;基于工控機(jī)的微機(jī)勵(lì)磁調(diào)節(jié)器,其硬件標(biāo)準(zhǔn)化程度高,軟件資源豐富,有實(shí)時(shí)操作系統(tǒng)支持,運(yùn)行速度快,實(shí)時(shí)性強(qiáng),圖文顯示方便,但裝置訪問(wèn)時(shí)間較長(zhǎng),體積大,且成本高,僅適合大型機(jī)組����。可靠性較高的可編程邏輯控制器PLC 由于其難以滿足同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器中同步信號(hào)周期測(cè)量及產(chǎn)生可控硅移相觸發(fā)脈沖的要求,而難以用于同步發(fā)電機(jī)勵(lì)磁裝置�����。因此,研制高可靠性���、多功能的勵(lì)磁控制系統(tǒng),并使之系列化��、通用化����、標(biāo)準(zhǔn)化是當(dāng)前的發(fā)展趨勢(shì)[1 ] 。
本文提出的基于PCC的同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器是以2003 系列可編程計(jì)算機(jī)控制器(PCC)為控制核心,它采用多處理器結(jié)構(gòu),其I/O處理器主要負(fù)責(zé)獨(dú)立于CPU的數(shù)據(jù)傳輸工作,而雙口控制器主要負(fù)責(zé)網(wǎng)絡(luò)及系統(tǒng)的管理,它們既互相獨(dú)立,又互相關(guān)聯(lián),從而使主CPU的資源得到了合理使用,同時(shí)又最大限度地提高了整個(gè)系統(tǒng)的速度���。采用基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID算法為控制策略的新一代同步發(fā)電機(jī)勵(lì)磁調(diào)節(jié)器,使得調(diào)節(jié)系統(tǒng)能夠根據(jù)發(fā)電機(jī)勵(lì)磁系統(tǒng)的實(shí)際運(yùn)行工況,自動(dòng)調(diào)整控制參數(shù)��。實(shí)際運(yùn)行結(jié)果表明,該調(diào)節(jié)器結(jié)構(gòu)簡(jiǎn)單�����、響應(yīng)快��、可靠性高���、便于維護(hù),具有自適應(yīng)能力以及良好的靜�����、動(dòng)態(tài)特性和很高的可靠性��。
2 PCC 勵(lì)磁調(diào)節(jié)器硬件[2 ,3 ]
PCC 勵(lì)磁調(diào)節(jié)器的硬件主要由2003 系列中的PP41 控制器,高速數(shù)字量輸出模塊DO135 ,同步整形電路,觸發(fā)脈沖放大電路,以及機(jī)端電壓��、無(wú)功功率�����、勵(lì)磁電壓、勵(lì)磁電流等變送器和模擬量輸入模塊AI774 等組成,參見(jiàn)圖1�����。另外PCC配有RS232���、RS485和CAN等多種通訊接口,與電廠監(jiān)控系統(tǒng)信息交互非常靈活����。
圖1 PCC 勵(lì)磁調(diào)節(jié)系統(tǒng)原理圖
Fig. 1 Scheme of excitation control system
PP41模塊是一種適應(yīng)于中小型機(jī)器控制系統(tǒng)的小型可編程計(jì)算機(jī)控制器,它集微處理單元CPU�、時(shí)間處理單元TPU、數(shù)字量輸入��、數(shù)字量輸出及液晶顯示屏于一體���。PP41自帶有10 個(gè)數(shù)字輸入端口,9 個(gè)數(shù)字輸出端口,并且有6 個(gè)可擴(kuò)展的插槽,根據(jù)勵(lì)磁裝置的要求,在PP41的基礎(chǔ)上僅增加了一塊模擬量輸入模塊AI774和兩塊數(shù)字量輸出模塊DO135即可滿足PCC勵(lì)磁調(diào)節(jié)器全部功能,其中DO135用于脈沖輸出,AI774用于勵(lì)磁電壓,機(jī)端電壓,無(wú)功功率,電網(wǎng)電壓等模擬量的輸入,其他開(kāi)關(guān)量的輸入輸出由PP41自帶的數(shù)字量端口完成�。由于脈沖輸出需要TPU的支持,兩塊DO135 模塊只能插在支持TPU的第4 ,5 ,6 三個(gè)插槽上,前三個(gè)插槽供模擬量輸入輸出�����、通訊模塊等其它模塊使用����。
同步信號(hào)接入同步整形電路,整形成方波信號(hào)后送入PP41可與TPU相連接的高速輸入端口,作為控制觸發(fā)的基準(zhǔn)點(diǎn)和同步信號(hào)周期測(cè)量信號(hào)���。使用PP41內(nèi)部的高速計(jì)數(shù)器將觸發(fā)控制角轉(zhuǎn)化為計(jì)數(shù)值,在計(jì)數(shù)值達(dá)到控制觸發(fā)角對(duì)應(yīng)的計(jì)數(shù)值時(shí),通過(guò)TPU 的處理,無(wú)延時(shí)地發(fā)出觸發(fā)脈沖至高速輸出模塊DO135,由于脈沖的功率比較小,需要經(jīng)過(guò)脈沖放大后,才能觸發(fā)功率回路。參見(jiàn)圖1��。
勵(lì)磁調(diào)節(jié)器的數(shù)據(jù)采集通過(guò)高性能的變送器將勵(lì)磁電流,勵(lì)磁電壓,機(jī)端電壓,無(wú)功功率,電網(wǎng)電壓等模擬量變換為4~20mA 的電流后送入調(diào)節(jié)器的A/D 轉(zhuǎn)換模塊AI774 ,經(jīng)過(guò)適當(dāng)處理后,供軟件的各種處理所用���。
3 PCC 勵(lì)磁調(diào)節(jié)器軟件
調(diào)節(jié)器軟件部分采用B&R 公司獨(dú)特的AB 高級(jí)語(yǔ)言編制,編程更方便,更利于描述復(fù)雜的控制思想���。整個(gè)軟件的結(jié)構(gòu)框圖如圖2。
(1) 同步信號(hào)周期測(cè)量原理
PCC模塊PP41內(nèi)部具有時(shí)間處理單元TPU ,該處理單
元利用其內(nèi)部6.29MHZ的計(jì)數(shù)時(shí)鐘測(cè)量輸入脈沖的頻率,PP41同步信號(hào)周期測(cè)量的基本思路是:先將同步電壓信號(hào)整形為同頻率的方波信號(hào),該方波信號(hào)經(jīng)PP41的開(kāi)關(guān)量輸入接口送入PP41的TPU輸入通道,TPU讀取方波信號(hào)兩相鄰上升沿之間的計(jì)數(shù)值N ,則所測(cè)同步信號(hào)周期為
T = N/fc
式中fc為PP41內(nèi)部計(jì)數(shù)器的計(jì)數(shù)頻率���。
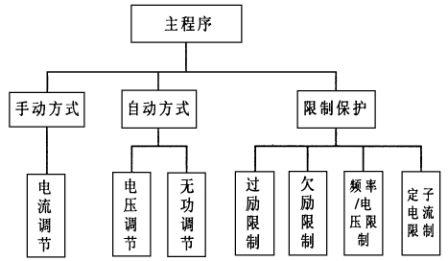
圖2 軟件功能結(jié)構(gòu)圖
Fig.2 Function structure of software
(2) 觸發(fā)脈沖的產(chǎn)生
對(duì)勵(lì)磁系統(tǒng)來(lái)說(shuō),控制晶閘管導(dǎo)通的觸發(fā)脈沖至關(guān)重要,它最終影響著勵(lì)磁調(diào)節(jié)系統(tǒng)的性能和安全可靠性�����。本文提出的勵(lì)磁調(diào)節(jié)器利用PCC和整形電路實(shí)現(xiàn)可控硅移相觸發(fā),取代了用單片機(jī)或工業(yè)控制計(jì)算機(jī)實(shí)現(xiàn)的可控硅移相觸發(fā)裝置,從而提高了可控硅移相觸發(fā)裝置的可靠性,減少了事故;又因該裝置的功能主要由PCC的TPU功能模塊實(shí)現(xiàn),使可控硅移相觸發(fā)軟件化,更便于使用���、維護(hù)及調(diào)整���。通過(guò)使用PP41內(nèi)部的TPU特有的功能模塊,可以形成所要求的觸發(fā)脈沖序列,其產(chǎn)生的過(guò)程如下:
①將用于檢測(cè)自然換流點(diǎn)的TPU通道D配以TPU的專用功能模塊LTXdilD(),該模塊設(shè)置為上升沿到來(lái)時(shí)無(wú)延時(shí)的向產(chǎn)生1號(hào)脈沖的TPU通道0發(fā)出一個(gè)鏈接信號(hào)。
?�、趯⒂糜诋a(chǎn)生1號(hào)脈沖的TPU通道0配以TPU的專用功能模塊LTXdO10(),該模塊設(shè)置為接到鏈接信號(hào)時(shí)延時(shí)LoFilterl后輸出一個(gè)寬HiFilter的高電平脈沖,同時(shí)在其上升沿時(shí)刻無(wú)延時(shí)的向產(chǎn)生2 號(hào)脈沖的TPU通道1發(fā)出一個(gè)鏈接信號(hào)��。LoFilterl對(duì)應(yīng)于移相角度,其值為移相角α乘以T/360 ;HiFilter 對(duì)應(yīng)于觸發(fā)脈沖寬度�����。
?���、蹖⒂糜诋a(chǎn)生2號(hào)脈沖的TPU通道1配以TPU的專用功能模塊LTXdoll(),該模塊設(shè)置為接到鏈接信號(hào)時(shí)延時(shí)LoFilter2后輸出一個(gè)寬HiFilter的高電平脈沖,同時(shí)在其上升沿時(shí)刻無(wú)延時(shí)的向產(chǎn)生3 號(hào)脈沖的TPU 通道2發(fā)出一個(gè)鏈接信號(hào)。LoFilter2對(duì)應(yīng)于T/6 即60°電角度�����。
其余脈沖按照與3 相同的方式依次產(chǎn)生����。
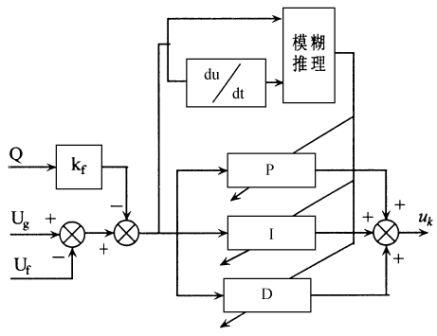
圖3 電壓PID 控制器原理框圖
Fig.3 Scheme of voltage PID controller
(3) 模糊PID 算法
目前國(guó)內(nèi)外的調(diào)節(jié)器所采用的調(diào)節(jié)規(guī)律大多數(shù)是PID型,而且基本是基于電力系統(tǒng)在某一特定的狀態(tài)下近似線性化的模型,在電力系統(tǒng)或發(fā)電機(jī)組遭受干擾而使實(shí)際的運(yùn)行狀態(tài)偏離設(shè)計(jì)所選的平衡點(diǎn)較遠(yuǎn),此時(shí)常規(guī)PID控制效果將會(huì)大受影響,甚至導(dǎo)致系統(tǒng)不穩(wěn)定。本文所提出的基于模糊規(guī)則的變參數(shù)PID能夠隨系統(tǒng)的運(yùn)行模式和運(yùn)行狀態(tài)的變化而自動(dòng)調(diào)整PID參數(shù),以適應(yīng)電力系統(tǒng)和發(fā)電機(jī)組不斷變化的控制要求���。勵(lì)磁電壓調(diào)節(jié)器的原理框圖如圖3 所示��。
圖3 中Ug 為給定電壓,Uf為機(jī)端電壓; Q為機(jī)組輸出無(wú)功功率, uk 為控制量, kf 為調(diào)差系數(shù)�。
離散化后的PID計(jì)算公式為:
uk( k)= yp( k)+ yi( k) + yd( k)
yp( k) = kp·e( k)
yi( k) = yi( k - 1) + kiT ·e( k)
yd ( k) =  ·( e ( k) - e ( k - 1) )
·( e ( k) - e ( k - 1) )
其中e(k)=Ug(k)-Uf(k)-kf ·Q(k))
yp、kI �、kd 分別為比例增益、積分增益����、微分增益, T 為采樣周期。
以上公式為恒機(jī)端電壓調(diào)節(jié)方式下的計(jì)算公式,在其它的控制方式下,采用相應(yīng)不同的模糊輸入量對(duì)PID控制規(guī)律的參數(shù)進(jìn)行調(diào)整����。本文中的模糊PID就是在上述固定參數(shù)PID的基礎(chǔ)上,根據(jù)系統(tǒng)運(yùn)行的實(shí)際工況采用模糊推理規(guī)則逐漸地修改PID參數(shù),以改善調(diào)節(jié)系統(tǒng)的動(dòng)態(tài)響應(yīng)[4 ,5 ] 。其參數(shù)調(diào)整規(guī)則如下:
規(guī)則1 :如果系統(tǒng)輸出大于給定值,減少kI �����;
規(guī)則2 :如果系統(tǒng)上升時(shí)間大于所要求的上升時(shí)間,且無(wú)超調(diào),增大kI �����;
規(guī)則3 :如果在穩(wěn)態(tài)時(shí)系統(tǒng)輸出有波動(dòng),適當(dāng)增大kd ���;
規(guī)則4 :如果系統(tǒng)輸出對(duì)干擾信號(hào)反應(yīng)敏感,適當(dāng)減小kd ����;
規(guī)則5 :如果系統(tǒng)上升時(shí)間過(guò)大,且kI較大,增大kp ����;
規(guī)則6 :規(guī)則2的優(yōu)先級(jí)高于規(guī)則5,即當(dāng)上升時(shí)間過(guò)大時(shí),先調(diào)整kI,再調(diào)整kp 。
根據(jù)以上規(guī)則,設(shè)計(jì)出用于修改kI, ki 和kd 的模糊參數(shù)調(diào)整矩陣表如下:
表1 qp 調(diào)整表
Table 1 qp adjusted table
表2 qI 調(diào)整表
Table 2 qI adjusted table
表3 qd 調(diào)整表
Table 3 qd adjusted table
kI , kp 和kd 參數(shù)按照下式進(jìn)行調(diào)整:
kp = k′p + Cp ×qp
kI = k′I + CI ×qI
kd = k′d + Cd ×qd
式中Cp, CI, Cd為比例系數(shù)�����;qp, qI, qd為修正系數(shù)�。
在qp, qI, qd的規(guī)則表建好后,只需根據(jù)偏差和偏差變化率的大小,通過(guò)查表就可獲得當(dāng)前的kp、kI�����、kd,通過(guò)PID運(yùn)算規(guī)律輸出控制�����。
4 電站試驗(yàn)
基于可編程計(jì)算機(jī)控制器的調(diào)節(jié)器2003年10月安裝于青海富源電站,并對(duì)該調(diào)節(jié)系統(tǒng)進(jìn)行了全面的靜態(tài)和動(dòng)態(tài)特性試驗(yàn),試驗(yàn)表明其性能指標(biāo)滿足或優(yōu)于國(guó)標(biāo)的要求,其中主要特性試驗(yàn)結(jié)果如下:
(1) 對(duì)機(jī)端電壓進(jìn)行下擾10% ,得到擾動(dòng)曲線如圖4 所示,無(wú)超調(diào)和振蕩,調(diào)節(jié)時(shí)間小于3 秒,優(yōu)于國(guó)標(biāo)GB/T7409.3-1997要求的�����。
(2) 對(duì)機(jī)端電壓進(jìn)行下擾50% ,得到擾動(dòng)曲線如圖5 所示,調(diào)節(jié)時(shí)間小于4 秒,優(yōu)于國(guó)標(biāo)GB/T7409.3-1997要求的��。
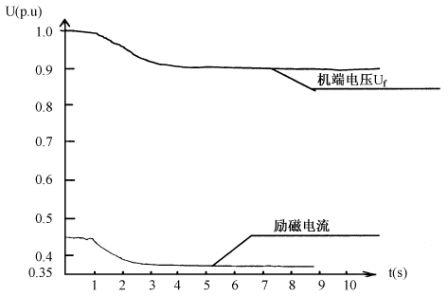
圖4 10%空載擾動(dòng)曲線
Fig. 4 No-load response curve with 10% disturbance
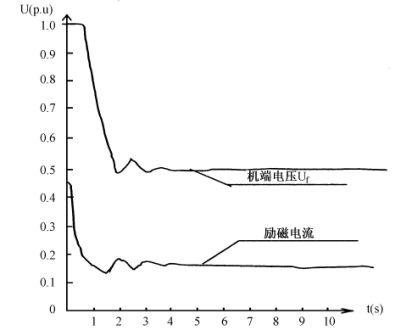
圖5 50%空載擾動(dòng)曲線
Fig. 5 No-load response curve with 10% disturbance
(3) 機(jī)組進(jìn)行全壓起勵(lì),響應(yīng)趨曲線如圖6 所示,圖中的電壓給定按指數(shù)曲線上升,調(diào)節(jié)時(shí)間為7 秒,無(wú)振蕩和超調(diào),優(yōu)于國(guó)標(biāo)GB/T7409.3 -1997要求的����。試驗(yàn)后勵(lì)磁調(diào)節(jié)器即投入運(yùn)行,一直運(yùn)行良好���。另外該勵(lì)磁調(diào)節(jié)器已先后在數(shù)十座電站運(yùn)行,運(yùn)行結(jié)果表明,該勵(lì)磁調(diào)節(jié)器具有很高的可靠性,快速性和穩(wěn)定性,獲得了用戶的一致好評(píng)。
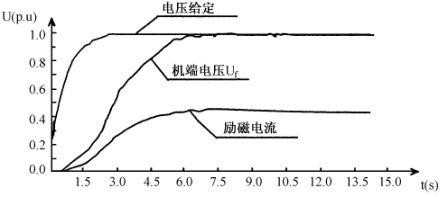
圖6 全壓起勵(lì)響應(yīng)曲線
Fig. 6 Full voltage start response curve
5 結(jié)語(yǔ)
本文提出的基于可編程計(jì)算機(jī)控制器的勵(lì)磁調(diào)節(jié)器具有如下特點(diǎn):
(1) 整形電路和可編程計(jì)算機(jī)控制器配以適當(dāng)軟件完成同步信號(hào)周期測(cè)量和移相觸發(fā)脈沖形成,提高了系統(tǒng)的可靠性及動(dòng)態(tài)品質(zhì)�。
(2) 采用可編程計(jì)算機(jī)控制器PCC作為勵(lì)磁調(diào)節(jié)器的硬件,其平均無(wú)故障率達(dá)50萬(wàn)小時(shí),大大提高了勵(lì)磁調(diào)節(jié)器的可靠性。
(3) 采用可編程計(jì)算機(jī)控制器PCC較之傳統(tǒng)的單片機(jī)勵(lì)磁調(diào)節(jié)器具有以下優(yōu)點(diǎn):采用多CPU并行處理,從而使主CPU的資源得到了合理使用,同時(shí)又最大限度地提高了整個(gè)系統(tǒng)的速度;采用多任務(wù)分時(shí)操作系統(tǒng),從而使整個(gè)系統(tǒng)得到優(yōu)化且具有較好的實(shí)時(shí)性;引進(jìn)了高級(jí)語(yǔ)言編程技術(shù),使編程更方便,更利于描述復(fù)雜的控制思想���。
(4) 基于模糊規(guī)則的適應(yīng)式參數(shù)自調(diào)整PID控制策略,實(shí)現(xiàn)同步發(fā)電機(jī)隨運(yùn)行狀態(tài)的變化而改變控制參數(shù),其動(dòng)態(tài)特性有了明顯改善�����。
因此,該勵(lì)磁調(diào)節(jié)器一經(jīng)推出就受到用戶的好評(píng),有著廣闊的應(yīng)用前景����。
參考文獻(xiàn):
[ 1 ] 曾洪濤等.高可靠智能型工業(yè)微機(jī)勵(lì)磁調(diào)節(jié)器的研制[J].水電能源科學(xué),2000. 6 :30~40.
[ 2 ] 南海鵬.水輪發(fā)電機(jī)組PCC控制[M].西安:西北工業(yè)大學(xué)出版社,2002. 9.
[ 3 ] 周雙喜,李丹編著.同步發(fā)電機(jī)數(shù)字式勵(lì)磁調(diào)節(jié)器[M].北京:中國(guó)電力出版社,1998. 6.
[ 4 ] 章衛(wèi)國(guó)等. 模糊控制理論與應(yīng)用[M].西安:西北工業(yè)大學(xué)出版社,1999. 10.
[ 5 ] Leonid Reznik ,Omar Ghanayem ,Anna Bourmistrov. PID Plus Fuzzy Controller Structures As a Design Base for Industrial Applications[M] . Engineering Applications of Artificial Intelligence ,13(2000) :419~430.
作者: 南海鵬(1963年生,男,西安理工大學(xué)教授),王濤,余向陽(yáng)
西安理工大學(xué),西安 710048