摘要:交流傳動的紙機在高速運行時��,由于系統(tǒng)建模帶來的控制偏差對精度的影響隨速度升高逐漸增大���,采用模糊控制可以摒棄建模偏差的影響��。針對傳統(tǒng)模糊控制穩(wěn)態(tài)精度差的缺點,采用分段模糊控制���,并加入PI 環(huán)節(jié)抑制穩(wěn)態(tài)顫振��,實現(xiàn)了高精度控制;硬件采用貝加萊介司的PCC ����。結(jié)果表明,該方法接線簡單�,并通過軟件編程實現(xiàn)了模糊控制��,節(jié)約了硬件����,克服了傳統(tǒng)PID 控制超調(diào)量大的問題。精度高����、動態(tài)響應(yīng)快�、開放性好、可靠性高����,易于工程實硯��,為紙機傳動控制打下了良好的理論和實驗基礎(chǔ)�����。
關(guān)鍵詞:造紙機;PCC ����;交流調(diào)速;摸糊控制���;異步電機;轉(zhuǎn)速控制
1 引言
隨著工廠生產(chǎn)規(guī)模的擴大和自動化程度的提高,交流調(diào)速應(yīng)用越來越廣泛��,而在造紙�、紡織�、軋鋼等行業(yè)大量使用多電機同步傳動系統(tǒng)。同步傳動控制要求首先解決單電機轉(zhuǎn)速的高精度控制問題�����,尤其是高速造紙機除了要解決因高速運行而引起的機械共振外���,還要求解決電氣控制上的間題.這些系統(tǒng)要求對數(shù)據(jù)傳送速率高、輸人信號響應(yīng)快����、跟蹤誤差小��、升降速平穩(wěn)����、無超調(diào)(或小超調(diào))��、穩(wěn)態(tài)精度高。由于異步電動機具有參數(shù)時變����、嚴重非線性特性���、強藕合性等不確定因素�����,精確模型難以建立�,現(xiàn)有的數(shù)學(xué)模型也不易于工程實現(xiàn),變頻器要建模也非易事����。模糊控制有效地解決了建模困難的問題��,使系統(tǒng)具有解耦能力�����,并且能抑制各種非線性因素對系統(tǒng)的影響�,具有強魯棒性,因此本文選用模糊控制�����,并采取了相應(yīng)措施提高了控制精度�����。
傳統(tǒng)的PLC 主要用于開關(guān)量控制��,很難實現(xiàn)復(fù)雜算法。本文在硬件上采用奧地利貝加萊公司的可編程計算機控制器PCC(Programmable Computer Controller) B&R 2005 , B&R 2005面向工業(yè)應(yīng)用���,具有強抗干擾能力�;模塊化的軟硬件設(shè)計使設(shè)計系統(tǒng)具有很好的開放性�,節(jié)省了硬件元器件和電路��,降低了成本���,增強了可靠性;B&R 2005 帶操作系統(tǒng)�����,可以用C 和Basic 等高級語言編程�����,可以實現(xiàn)模糊控制等復(fù)雜算法����;其操作系統(tǒng)的分時多任務(wù)處理方式讓控制系統(tǒng)具有了很好的實時性����;可以通過現(xiàn)場總線PROFIBUS 、CAN 和以太網(wǎng)通信����,通信速率高�����。本文給出的相關(guān)實驗數(shù)據(jù)表明所采用控制方式能達到滿意的效果��,為高速造紙機傳動控制提供了實現(xiàn)方法����。
2 模糊控制思路
根據(jù)工程實際�,采用如圖1 所示的模糊控制系統(tǒng)框圖���。模糊控制能克服傳統(tǒng)PID 控制超調(diào)量大的間題�����,但是普通的模糊控制存在穩(wěn)態(tài)精度差和穩(wěn)態(tài)顫振問題。因此����,本文采用雙模模糊控制,并加人PI 環(huán)節(jié)�����,這樣施加在被控對象上的控制量u 具有非線勝PID 控制律����,提高了穩(wěn)態(tài)精度�,有效抑制了顫振現(xiàn)象。
圖1 模糊控制系統(tǒng)示意圖
3 硬件構(gòu)成
異步電動機轉(zhuǎn)速控制系統(tǒng)的硬件框圖如圖2 所示���。主控制器采用貝加萊公司的可編程計算機控制器B&R 2005 �����,它將工業(yè)控制機(IPC )及計算機集散控制系統(tǒng)(DCS )以及可編程邏輯控制器(PLC )融合在一起,主要應(yīng)用于復(fù)雜程度較高的控制對象和過程控制系統(tǒng)�����。B&R 2005 軟硬件均采用模塊化設(shè)計��,具有系統(tǒng)的高速響應(yīng)�����,實時性好����。更突出的是它帶操作系統(tǒng),可用Basic 和C 等高級語言編程�����,可以勝任模糊控制算法的編程。它的配置采用12 槽的底板3BP151.41 ����,電源模塊PS794 , CPU 模塊CP260 ��,并行處理器模塊IF671 ����,計數(shù)模塊NC150����。 IF671 提供了485 接口,用于控制變頻器��;NC150 提供兩路光電編碼器輸人����,接電機的轉(zhuǎn)速反饋信號�����。
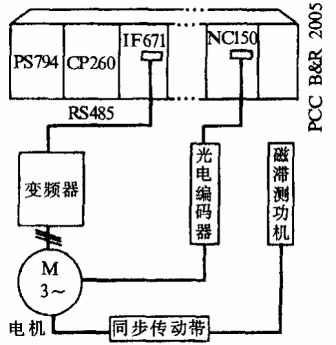
圖2 轉(zhuǎn)速模糊控制系統(tǒng)硬件方框圖
Fig.2 Hardware configuration of the speed fuzzy control system
變頻器采用Slemens 的MicroMaster 6SE3115�����,功率為2.2kW ����。電機采用YVP 90S-4 型三相異步交流電動機�,功率為1.1 kW ,額定電流3A ����,電壓380v , 額定轉(zhuǎn)矩7N·m �。另外采用KZQ 一II 型磁滯測功機控制器,它提供負載轉(zhuǎn)矩���,能及時檢測和顯示電機的轉(zhuǎn)速、轉(zhuǎn)矩���、輸出功率和效率�,并提供數(shù)據(jù)打印功能和帶有接口可以通過計算機的串行口與計算機通訊����。測速采用每轉(zhuǎn)600 個脈沖的增量式光電編碼器�����。
4 模糊控制器的改進和設(shè)計
4 . 1 語言變量����、語言值和論域的選擇
模糊控制器的輸人語言變量選為電機的實際轉(zhuǎn)速n和給定轉(zhuǎn)速ng之間的誤差�。e﹦n一ng及其變化率e �����,而其輸出語言變量可選為控制變頻器的給定轉(zhuǎn)速u���。這樣就為轉(zhuǎn)速控制系統(tǒng)確定了一個雙輸人單輸出的模糊控制器��。
輸人語言變量誤差E 、誤差變化EC 以及輸出語言變量U 的論域均選為{﹣6 ,﹣5 ��,...,﹣1 , 0 , 1 ��,...��,5 , 6 }���。要提高基本模糊控制器的精度和跟蹤性能����,就必須對語言變量取更多的語言值,即分檔越細���,性能越好,但同時規(guī)則數(shù)和系統(tǒng)的計算量也大大增加�����,影響調(diào)試和控制的實時性[1] ����。因此���,在工程實際應(yīng)用中必須選擇一個合適的分檔次數(shù)�����,使得控制系統(tǒng)既能滿足控制精度要求和實時性要求,又能易于工程實現(xiàn)��。鑒于此���,此處E , EC 和U 的語言值均選為PB , PM , PS , ZE , NS , NM , NB 。
4 . 2 語言變量E ���、EC和U 的賦值表的建立
語言變量的模糊子集的隸屬度函數(shù)u(x )究竟選用哪一種好��,目前沒有統(tǒng)一的理論依據(jù)。在工程應(yīng)用的實際中�����,通常根據(jù)經(jīng)驗和實際控制要求確定模糊隸屬度函數(shù)�。一般情況下����,高斯模糊隸屬度函數(shù)的正態(tài)分布特性能滿足大部分工程的精度要求和控制性能��,所以采用高斯模糊隸屬度函數(shù)�����。其數(shù)學(xué)表達式為
 (1)
(1)
選定隸屬度函數(shù)拜u(x )的類型之后還得注意它的形狀。隸屬度函數(shù)的形狀對控制效果影響很大�����,如圖3 所示�����,圖中窄型隸屬函數(shù) 反映模糊集合
反映模糊集合 具有高分辨率特性��,控制的靈敏度高;寬型隸屬函數(shù)
具有高分辨率特性��,控制的靈敏度高;寬型隸屬函數(shù)  反映模糊集合
反映模糊集合 具有低分辨率���,控制的靈敏度低���。一般在系統(tǒng)誤差較大的范圍內(nèi),采用低分辨率隸屬函數(shù)�,而在系統(tǒng)誤差較小時,采用具有高
具有低分辨率���,控制的靈敏度低���。一般在系統(tǒng)誤差較大的范圍內(nèi),采用低分辨率隸屬函數(shù)�,而在系統(tǒng)誤差較小時,采用具有高
分辨率隸屬函數(shù)�。確定隸屬函數(shù)后并根據(jù)操作者實際經(jīng)驗修正可得列表格所示的語言變量的賦值表��。表1~3 所示的分別是語言變量E , EC 和U 的賦值表����。
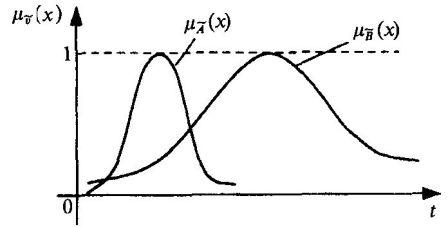
圖3 隸屬度函數(shù)圖
Fig.3 The membership functions
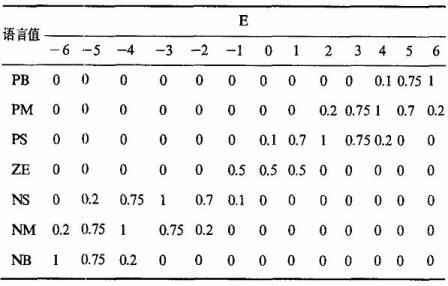
表1 語言變量E 的賦值表
Table 1 The value of language variable E
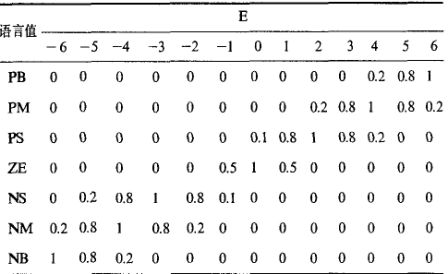
表2 語言變量EC的賦值表
Table 2 The value of language variable EC
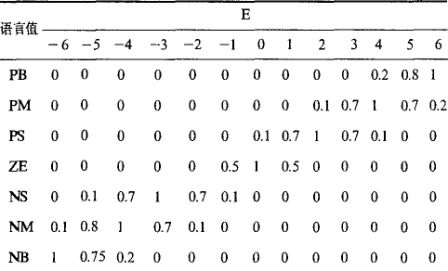
表3 語言變量U的賦值表
Table 3 The value of language variable U
4 . 3 建立模糊控制規(guī)律表
將操作者在控制過程中的實踐經(jīng)驗加以總結(jié)建立模糊控制規(guī)則��。通過總結(jié)操作者手動控制策略,可建立變頻器控制的異步電動機轉(zhuǎn)速控制規(guī)則的模糊狀態(tài)表��,見表4 所示�����。
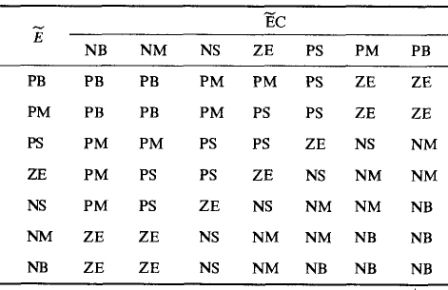
表4 模糊控制規(guī)則表
Table 4 rules of fuzzy logic controller
4 . 4 模糊條件推理
?��、?設(shè)有 ,
, �,
�, 分別是論域上X�����、Y 、Z 的模糊子集�,則由模糊條件語句"if and then "所決定的模糊關(guān)系R 由下式計算出[2]
分別是論域上X�����、Y 、Z 的模糊子集�,則由模糊條件語句"if and then "所決定的模糊關(guān)系R 由下式計算出[2]
 (2)
(2)
其中  為模糊關(guān)系矩陣
為模糊關(guān)系矩陣  構(gòu)成的nm維列向量���,n和m分別是模糊集合 與 的論域元素數(shù)。
構(gòu)成的nm維列向量���,n和m分別是模糊集合 與 的論域元素數(shù)。
基于推理合成規(guī)則����,可求得在給定輸人模糊集合 1及 1下對應(yīng)的輸出模糊集合 1為
 ( 3 )
( 3 )
其中 為
為 的轉(zhuǎn)置����。
的轉(zhuǎn)置����。
② 根據(jù)表4 中的模糊條件語句確定模糊關(guān)系Ri( i = l , 2 ����,… ��,49 ) ��,其中R1 , , ,· �,R49 分別計算為
 (4)
(4)
然后根據(jù)公式進行模糊關(guān)系的并運算可求得轉(zhuǎn)速控制的總模糊關(guān)系 ���,即
���,即
 (5)
(5)
?���、?由語言變量誤差E 和誤差變化EC 的賦值表�����,針對論域{﹣6 �����,﹣5 �����,… ��,﹣1 , 0 , l �����,… �����,5 , 6 }中所有元素的所有組合���,根據(jù)公式(3 )求取相應(yīng)的語言變量控制量變化U 的模糊集合�,并根據(jù)公式(6 )加權(quán)平均法去模糊��。
 (6)
(6)
其中Xi為論域中的每個元素���,uUi ( xi)為其隸屬度���,平均值x0就是應(yīng)用加權(quán)平均法為模糊集合Uj 求得的判決結(jié)果。對x0取整可得對應(yīng)的實際控制量變化值���。計算j = 1 , 2 ��,… �����,169 所有模糊集合Uj的判決結(jié)果���,并根據(jù)操作者經(jīng)驗修正,便可得如表5 所示的查詢表�。在實際工程應(yīng)用中���,只將表5 所示的已經(jīng)算好的查詢表存人到控制器內(nèi)存中查詢運算��,這樣在線的計算量就不大,實時性也有了保證�����。
4 . 5 量化因子ke�、kec 和比例因子ku的確定
在工程實際中�,如何根據(jù)系統(tǒng)的性能快速確定量化因子ke��、kec 和比例因子ku��,目前還沒有統(tǒng)一的標準����。ke、kec和ku三者互相影響和牽制���,選擇時應(yīng)綜合考慮。ke越大���,系統(tǒng)上升速率越快����,超調(diào)量越大�����,系統(tǒng)的調(diào)節(jié)時間增長�,嚴重時會產(chǎn)生振蕩乃至不穩(wěn)定���;但ke過小,系統(tǒng)上升速率過小��,影響穩(wěn)態(tài)精度����。kec越大�,系統(tǒng)狀態(tài)變化的抑制能力越大���,增強了系統(tǒng)穩(wěn)定性;但kec過大����,對系統(tǒng)輸出上升速率過小���,過渡過程時間變長�����,kec過小���,輸出上升速率過大���,嚴重時會導(dǎo)致系統(tǒng)產(chǎn)生過大的超調(diào)乃至振蕩。ku增大�,系統(tǒng)響應(yīng)速度加快,但ku過大會導(dǎo)致超調(diào)量大乃至振蕩或發(fā)散�����,ku過小����,系統(tǒng)輸出上升速率較小,快速性變差�,穩(wěn)態(tài)精度差���。
表5 模糊控制粗查詢表
Tahle 5 The outPut value of FC output( e≥50 )

通常的模糊控制器具有非線性PD 控制律�����,比例因子ke、kec分別相當于模糊控制的比例作用和微分作用的系數(shù)����。筆者根據(jù)工程實際中的調(diào)節(jié)經(jīng)驗,在模糊控制器的參數(shù)確定過程中��,首先根
據(jù)實際對象所允許的最大穩(wěn)態(tài)誤差�,按一定比例設(shè)定ke、kec��、ku﹦1 ���。首先調(diào)整ke,增大ke�����,每次翻倍����,即以2ke �����,的速率遞增����,直至出現(xiàn)振蕩���,然后返回振蕩前一步的值作為ke的值�����。接著確定kec,增大kec���,每次翻倍�,即以2kec的速率遞增��,直至影響系統(tǒng)調(diào)節(jié)時間超出規(guī)定的允許值����,然后返回前一步的值作為kec值���。適當?shù)卦黾觡u直至系統(tǒng)出現(xiàn)振蕩。最后再根據(jù)實際控制情況微調(diào)�,在異步電動機的轉(zhuǎn)速模糊控制過程中����,最終確定ke﹦0.01667,kec﹦0.1,ku﹦2,ki﹦0.8 。
4 . 6 提高穩(wěn)態(tài)精度并考慮克服顫振
根據(jù)上述模糊查詢表控制的異步電機轉(zhuǎn)速誤差大�,而且存在顫振現(xiàn)象。為解決精度和顫振的問題�,首先將控制分段,在轉(zhuǎn)速誤差e≥50 時�,仍然采用表5 所示的查詢表����;而在e≤50 時采用表6 所示的細調(diào)查詢表,此查詢表對應(yīng)的ke﹦0.35 , ku ﹦0.25 ��,ki﹦0.5 ��。同時將輸出U 經(jīng)過PI 比例積分環(huán)節(jié)���。經(jīng)過調(diào)整措施后,系統(tǒng)的控制性能大大改善��,有效抑制了顫振��,精度大大提升��,穩(wěn)態(tài)精度控制在8‰之內(nèi)。表7 ��、表8 分別給出了粗調(diào)后和細調(diào)后的異步電機轉(zhuǎn)速模糊控制的誤差和調(diào)節(jié)時間等有關(guān)數(shù)據(jù)。圖4 給出了實驗結(jié)果���。實驗表明:模糊控制較PID 調(diào)節(jié)具有更好的動態(tài)響應(yīng)性能,超調(diào)量?���?���;而帶PI 環(huán)節(jié)的分段模糊控制比經(jīng)典模糊控制具有更好的穩(wěn)態(tài)性能�,而動態(tài)性能卻相差無幾。
表6 模糊控制細查詢表
Table 6 The output value of FC ( e < 50 )
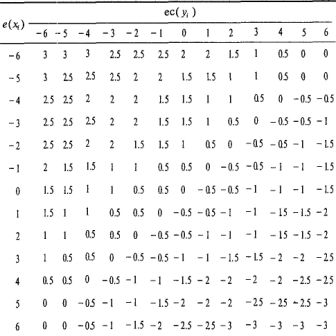
表7 轉(zhuǎn)速模糊控制粗調(diào)后的相關(guān)數(shù)據(jù)
Table 7 The results of fuzzy controller
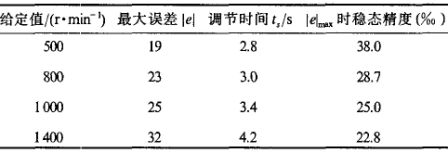
表8 轉(zhuǎn)速模糊控制細調(diào)后的相關(guān)數(shù)據(jù)
Table 8 The results of revised fuzzy controller
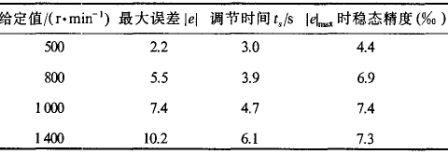
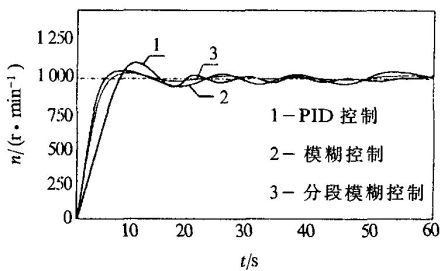
圖4 速度的PID 控制和模糊控制的實驗結(jié)果
Fig.4 The results of control experiment
5 軟件設(shè)計
B&R 20O5 型PCC 帶分時多任務(wù)的操作系統(tǒng)��,可以用Automation Studio Basic 或C 語言編程�����,這為模糊控制提供了可能。本文采用Automation Studio Basic 編程�。變頻器通過RS485 控制,由于不具有標準通信協(xié)議�,這里利用PCC 帶的幀驅(qū)動開發(fā)功能,開發(fā)了PCC 和變頻器的通信協(xié)議����。轉(zhuǎn)速采樣通過NC150 ,可軟件設(shè)定倍頻數(shù)�����,這里設(shè)定為正4 倍頻�����。轉(zhuǎn)速采樣和濾波作為一個任 務(wù)����、通信作為一個任務(wù)����,模糊控制作為一個,分別放在3 個軟件模塊中�。普通的PLC 各個任務(wù)都在同一個循環(huán)周期內(nèi),由于用于通信的任務(wù)占用的循環(huán)時間較多����,導(dǎo)致整個系統(tǒng)的循環(huán)時間超過采樣任務(wù)所要求的循環(huán)時間���,這就難以保證通信任務(wù)數(shù)據(jù)采集的實時性;而且就PLC 而言�����,如果用戶有新的要求�,則需要改變整個程序���。PCC 則可以發(fā)揮軟件模塊化的優(yōu)勢�,只修改相應(yīng)的部分。這里只介紹模糊控制的編程思路��。將表5 和表6 中的數(shù)據(jù)存在內(nèi)存中���,然后根據(jù)實際采樣值查詢[3] ,查得的控制量變化乘以比例因子加到模糊控制輸出上����,然后經(jīng)過PI 環(huán)節(jié)輸出。模糊控制模塊的流程圖如圖5 所示�。
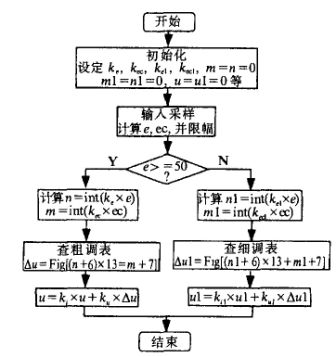
圖5 軟件流程圖
Fig.5 Software block diagram
值得指出的是,高速造紙機傳動控制系統(tǒng)要求車速穩(wěn)態(tài)運行精度達到1‰及更高��,本控制系統(tǒng)之所以沒有達到這個標準��,分析其原因有3 方面:① 雖然采用B&R 2005 型可編程計算機控制器���,可采用現(xiàn)場總線連接,通信速率高��,但本實驗限于變頻器的通信方式RS 一485 和最高通信速率19.2 kbit/s 的限制�,數(shù)據(jù)傳輸速率低����,導(dǎo)致系統(tǒng)響應(yīng)慢;② 采用Siemens變頻器MicroMaster 6SE3115 �,分辨率低�,控制精度低; ③ 限于實驗設(shè)備�����,采用了600 個脈沖/轉(zhuǎn)的光電編碼器�����,精度低�����,高速紙機應(yīng)采用1024 個脈沖/轉(zhuǎn)及以上的編碼器���。這些問題不影響模糊控制能提高控制精度和獲得良好的啟動性能的結(jié)論。在實際高速紙機應(yīng)用中可通過選取高性能的變頻器和編碼器來解決����。
6 結(jié)束語
同步傳動控制系統(tǒng)要求首先解決單臺電機轉(zhuǎn)速的高精度控制問題���,尤其是高速造紙機要求車速穩(wěn)態(tài)運行精度達到l‰及更高,并且需要優(yōu)良的啟動性能�。模糊控制有效地解決了異步電動機拖動系統(tǒng)建模困難的問題,克服了傳統(tǒng)PID 控制超調(diào)量大的缺點���,更適合造紙機升降速平穩(wěn)、無超調(diào)的控制方式。采用雙模模糊控制���,提高了控制的穩(wěn)態(tài)精度��。為了便于工程實現(xiàn),本文采用查詢表的方式�,提高了控制的實時性并加入PI環(huán)節(jié),這使得施加在被控對象上的控制量u 具有非線性PID 控制律����,提高了精度�,有效抑制了顫振現(xiàn)象。采用面向工業(yè)應(yīng)用的可編程計算機控制器B&R 2005 ����,由于帶分時多任務(wù)的操作系統(tǒng),模塊化的軟硬件設(shè)計��,采用高級語言編程���,節(jié)省了成本����,增強了系統(tǒng)控制實時性����、可靠性����,使系統(tǒng)具有良好的開放性���,為高速造紙機傳動控制系統(tǒng)打好了理論和實驗基礎(chǔ)��。關(guān)于多電機同步傳動模糊控制系統(tǒng)��,需要對速度控制,張力控制和負荷分配作綜合考慮���,由于篇幅限制在此不再詳述,作者將另文研究���。
參考文獻:
[1] 諸靜.模糊控制原理及應(yīng)用[M] .北京:機械工業(yè)出版社,1995
[2] 章衛(wèi)國����,楊向忠.摸糊控制理論與應(yīng)用[M] .西安:西北工業(yè)大學(xué)出版社�,1999
[3] 黎浩榮���,李立勤,李東海��,等.對一種高精度模糊控制方案的研究與改進[j].清華大學(xué)
?��。ㄗ匀豢茖W(xué)版),2000, 40(2) : 114 一117
作者簡介:汪明(1976).男����,山東大學(xué)碩士研究生,主要研究方向是工業(yè)過程的建模����,計算機控制技術(shù)等�;
張承慧(1963),男�����,博士,教授�����,博士生導(dǎo)師���,主要研究方向是參數(shù)估計及運動控制技術(shù);
崔納新(1968)�����,女�,博士研究生����,副教授,研究方向為智能控制�����、電力電子與電力傳動���。
作者:汪明1,張承慧2 �����,崔納新2
( l.山東建筑工程學(xué)院信息與電氣工程系��,山東濟南250014��;2.山東大學(xué)控制科學(xué)與工程學(xué)院�,山東濟南25006l )