╘┌CN╝╝╨g(sh¿┤)║═╝ñ╣Γ╝╙╣ñ╟╨╕ε╨┬╝╝╨g(sh¿┤)╥╤╜¢(j¿⌐ng)ÅV╖║æ¬(y¿⌐ng)╙├╙┌╜≡î┘��íó╞ñ╕∩���íóÅV╕µ╡±┐╠╡╚╟╨╕ε╝╙╣ñεI(l¿½ng)╙≥╡─╜±╠∞ú¼▓╔╙├╨┬╨═╡─²êΘT(m¿ªn)ÖC(j¿⌐)ÿï(g¿░u)╘O(sh¿¿)╙ï(j¿¼)╡─┤≤╖∙├µÖC(j¿⌐)╞≈���ú¼╖∙├µ┐τ╢╚┐╔▀_(d¿ó)╡╜3mx5m╙╨╨º╡─╝╙╣ñ╨╨│╠�����ú¼╩╣╙├┴╦░▓╤b╘┌┤▓╔φé╚(c¿¿)╡─îº(d¿úo)▄ë╘O(sh¿¿)╙ï(j¿¼)��ú¼╝ñ╣Γε^┐v╧≥╬╗╥╞▌S╛═┐╔╥╘╖╜▒π╡─╥╘ΘT(m¿ªn)╫╓╨╬╜Y(ji¿ª)ÿï(g¿░u)┐τ╫°╘┌ÖM╧≥╬╗╥╞îº(d¿úo)▄ë╔╧���ú¼═¼òr(sh¿¬)╬╗╥╞╙╔ÖM╧≥â╔éÇ(g¿¿)╦┼╖■±R▀_(d¿ó)═¼▓╜╬╗╥╞≥î(q¿▒)ä╙(d¿░ng)â╔╕∙╜zùUüφ(l¿ói)═Ω│╔ÖM╧≥╬╗╥╞íú╚τ╧┬êD╦∙╩╛���íú▀@ÿ╙╪ô(f¿┤)▌d╓╪┴┐╛═╙╔2▀àîº(d¿úo)▄ë║═╜zùU╖╓Θ_(k¿íi)│╨╩▄�ú¼║▄║├╡─╜Γ¢Q┴╦┤≤╖∙├µÖC(j¿⌐)╨╡╡─╖∙├µ▀^(gu¿░)┤≤����íóÖC(j¿⌐)╨╡äé╨╘▓╗╫π╡─åû(w¿¿n)ε}�íú
╜Γ¢Q┴╦╔╧╩÷åû(w¿¿n)ε}║≤����ú¼─╟╘⌡├┤ÿ╙▓┼─▄║▄║├╡─≥î(q¿▒)ä╙(d¿░ng)δèÖC(j¿⌐)╩╣â╔▀à╡─╦┼╖■±R▀_(d¿ó)─▄ë≥▒ú│╓╕▀╛½╢╚╡─╬╗╓├═¼▓╜─╪ú┐▒╛╬─╛═╥╘²êΘT(m¿ªn)╝ñ╣Γ╟╨╕εÖC(j¿⌐)₧Θ░╕└²�ú¼╘ö╩÷┴╦╚τ║╬└√╙├A2╦┼╖■¬Ü(d¿▓)╙╨╡─²êΘT(m¿ªn)═¼≥î(q¿▒)╣ª─▄���ú¼âH╥╘╥╗┬╖├}¢_├ⁿ┴ε╫≈₧Θ├ⁿ┴εüφ(l¿ói)╘┤�ú¼╝┤┐╔îì(sh¿¬)¼F(xi¿ñn)â╔éÇ(g¿¿)╦┼╖■δèÖC(j¿⌐)╓«Θg╡─╕▀╛½╢╚═¼▓╜┐╪╓╞╖╜░╕�íú
1. ┼_(t¿ói)▀_(d¿ó)╕▀╛½╢╚²êΘT(m¿ªn)═¼≥î(q¿▒)╖╜░╕
é≈╜y(t¿»ng)╡─²êΘT(m¿ªn)═¼≥î(q¿▒)δèÖC(j¿⌐)┐╪╓╞ú¼╥╗░π╢╝╨Φ╥¬╔╧╬╗┐╪╓╞╞≈╡─┼Σ║╧���ú¼╨Φ╥¬¬Ü(d¿▓)┴ó╡─â╔┬╖├ⁿ┴ε═¿╡└▓┼─▄ë≥┐╪╓╞â╔▌S═¼≥î(q¿▒)�����íú┼cé≈╜y(t¿»ng)²êΘT(m¿ªn)═¼≥î(q¿▒)┐╪╓╞╝▄ÿï(g¿░u)╧α▒╚���ú¼╨┬╡─A2┐╪╓╞╖╜╩╜ú¼ƒo(w¿▓)╨Φ╨▐╕─╔╧╬╗┐╪╓╞╞≈╡─╙▓╝■╜╙┐┌╘O(sh¿¿)╓├║═àóö╡(sh¿┤)╘O(sh¿¿)╙ï(j¿¼)���ú¼╓╗╨Φ╥¬╕─╫â╔╧╬╗┐╪╓╞╞≈║═A2╦┼╖■╜╙╛Ç�����ú¼╥╘╝░╘O(sh¿¿)╢¿╧αæ¬(y¿⌐ng)╡─àóö╡(sh¿┤)╝┤┐╔╥╘îì(sh¿¬)¼F(xi¿ñn)δp╦┼╖■═¼≥î(q¿▒)╣ª─▄�����ú¼▀@╩╟A2╦┼╖■▀\(y¿┤n)ä╙(d¿░ng)┐╪╓╞╡─╥╗┤≤╠╪╔½╣ª─▄���íú
2. ²êΘT(m¿ªn)═¼≥î(q¿▒)╡─┐╪╓╞╝▄ÿï(g¿░u)║═╛▀≤w╜╙╛Ç
a)┐╪╓╞╞≈▀x╨═
²êΘT(m¿ªn)═¼≥î(q¿▒)φÜ╩╣╙├A2-m/u/l╨═≥î(q¿▒)ä╙(d¿░ng)╞≈�����ú¼≥î(q¿▒)ä╙(d¿░ng)╞≈▒╪φÜ╛▀╙╨cn5╜╙┐┌�ú¼╥≥?y¿ñn)Θ▀@╥╗éÇ(g¿¿)╜╙┐┌┐╔╓º│╓A2≥î(q¿▒)ä╙(d¿░ng)╞≈╜╙╩▄│²╫╘╔φ╛Ä┤a╞≈╖┤≡ü╓«═Γ╡─��íóüφ(l¿ói)╫╘╙┌┴φ═Γ╥╗εw╦┼╖■╡─╡┌╢■┬╖╛Ä┤a╞≈╖┤≡ü��íú
b)┐╪╓╞╞≈╝▄ÿï(g¿░u)
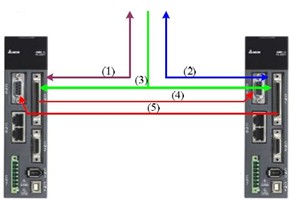
1)╔╧╬╗┐╪╓╞╞≈╜o▌Só┘╡─╦┼╖■di/do╨┼╠û(h¿ño)
2)╔╧╬╗┐╪╓╞╞≈╜o▌Só┌╡─╦┼╖■di/do╨┼╠û(h¿ño)
3)╔╧╬╗┐╪╓╞╞≈╜oâ╔▌S╡─╥╗┬╖├}¢_├ⁿ┴ε╨┼╠û(h¿ño)
4)▌Só┘pg╨┼╠û(h¿ño)▌ö│÷╜o▌Só┌╡─cn5╨┼╠û(h¿ño)
5)▌Só┌pg╨┼╠û(h¿ño)▌ö│÷╜o▌Só┘╡─cn5╨┼╠û(h¿ño)
c)╛▀≤w╜╙╛Ç╚τ╧┬���ú¼╥╘▌Só┘╦┼╖■₧Θ└²

3. ╖╜░╕╡─îì(sh¿¬)╩⌐
a)╦┼╖■╗∙▒╛àóö╡(sh¿┤)╘O(sh¿¿)╢¿-δè╫╙²X▌å▒╚╘O(sh¿¿)╢¿
«ö(d¿íng)╜╙╛Ç╜╙║├���ú¼Öz▓Θ┤_╒J(r¿¿n)ƒo(w¿▓)╒`║≤ú¼╝┤┐╔▀M(j¿¼n)╨╨╦┼╖■àóö╡(sh¿┤)╡─╘O(sh¿¿)╓├��íú╩╫╧╚�ú¼╚í╧√╧αΩP(gu¿ín)ƒo(w¿▓)╙├╡─diú¼╜Γ│²ê≤(b¿ño)╛»╨┼╧óale13�íóale14�����íóale15ú¼═¼òr(sh¿¬)╨Φ╥¬╘O(sh¿¿)╢¿╔╧╬╗┐╪╓╞╞≈îª(du¿¼)╦┼╖■├ⁿ┴ε╡─δè╫╙²X▌å▒╚àóö╡(sh¿┤)�����ú¼╘O(sh¿¿)╢¿îª(du¿¼)╒²┤_╡─δè╫╙²X▌å▒╚╩╟╦┼╖■╒²┤_▀\(y¿┤n)ä╙(d¿░ng)╡─╟░╠ß��ú¼╟╨╙¢â╔▌S╡─δè╫╙²X▌å▒╚╘O(sh¿¿)╢¿╡─ö╡(sh¿┤)╓╡╥¬▒ú│╓╥╗╓┬íú
╘O(sh¿¿)╢¿ö╡(sh¿┤)╓╡p1-44 δè╫╙²X▌å▒╚╖╓╫╙�ú¼│÷ÅS╘O(sh¿¿)╢¿╓╡₧Θ128�íú
╘O(sh¿¿)╢¿ö╡(sh¿┤)╓╡p1-45 δè╫╙²X▌å▒╚╖╓─╕�����ú¼│÷ÅS╘O(sh¿¿)╢¿╓╡₧Θ10�ú¼╝┤╦┼╖■≥î(q¿▒)ä╙(d¿░ng)╞≈╜╙╡╜10╚f(w¿ñn)pulse��ú¼±R▀_(d¿ó)▓┼▀\(y¿┤n)▐D(zhu¿ún)╥╗╚ªú¼╜¿╫h╕∙ô■(j¿┤)╔╧╬╗┐╪╓╞╞≈░l(f¿í)╦═├}¢_╡─├}¢_─▄┴ª����ú¼╥╘╝░╫ε╕▀▀\(y¿┤n)ä╙(d¿░ng)╦┘╢╚��ú¼▀Ç╙╨╜zùU╡─┬▌╛α╡╚╥≥╦╪╛C║╧┐╝æ]����íú
▀@└∩┼e└²╝┘╘O(sh¿¿)₧Θp1-45=1����ú¼╝┤10000pulse��ú¼δèÖC(j¿⌐)▀\(y¿┤n)╨╨╥╗╚ª���íú╣½╩╜╚τ╧┬ú║
1280000xp1-45í┬p1-44=1280000x1í┬128=10000pulseíú
b)╦┼╖■æT┴┐▒╚£y(c¿¿)╢¿
╦┼╖■æT┴┐▒╚╡─╣└£y(c¿¿)║═╦┼╖■╘÷╥µ╡─╒{(di¿ño)╒√�����ú¼▓╜≤E╚τ╧┬ú║
1)╧╚îó²êΘT(m¿ªn)ÖC(j¿⌐)ÿï(g¿░u)╜Γ│²ú¼Öz▓Θ╦∙╙╨╡─ÖC(j¿⌐)ÿï(g¿░u)╝░╦┼╖■╔╧╡─╘O(sh¿¿)╢¿��ú¼╚τ╝▒═ú╥╘╝░╫≤╙╥ÿO╧▐╡╚��ú¼┤_╒J(r¿¿n)╩╟╖±╒²│ú╙╨╨ºúí
2)îóâ╔┼_(t¿ói)≥î(q¿▒)ä╙(d¿░ng)╞≈╔╧╡─├µ░σ▒O(ji¿ín)╥ò╒{(di¿ño)╒√₧Θj-lú¿p0-02=15▒O(ji¿ín)£y(c¿¿)æT┴┐╙├ú⌐�íú
3)╔╧╬╗┐╪╓╞╞≈╧┬▀_(d¿ó)├}▓¿╓╕┴ε��ú¼╧╚╥╘┬²╦┘üφ(l¿ói)╗╪╥╞ä╙(d¿░ng)²êΘT(m¿ªn)ÖC(j¿⌐)ÿï(g¿░u)��ú¼┤_╢¿ÖC(j¿⌐)ÿï(g¿░u)▀\(y¿┤n)▐D(zhu¿ún)¢](m¿ªi)╙╨åû(w¿¿n)ε}ú¼┬²┬²╝╙┐∞üφ(l¿ói)╗╪╥╞ä╙(d¿░ng)╦┘╢╚�ú¼╙^┐┤≥î(q¿▒)ä╙(d¿░ng)╞≈╔╧╡─æT┴┐∩@╩╛�íú
4)╡╚∩@╩╛╖Ç(w¿ºn)╢¿║≤ú¼îóæT┴┐▒╚╖╓äeîæ(xi¿º)╚δ╡╜╕≈╫╘┐╪╓╞╞≈╡─p1-37àóö╡(sh¿┤)(«ö(d¿íng)ÖC(j¿⌐)╨╡╜Y(ji¿ª)ÿï(g¿░u)▓╗îª(du¿¼)╖Q(ch¿Ñng)òr(sh¿¬)����ú¼╕≈╫╘╡─æT┴┐▒╚╙╨┐╔─▄▓╗═¼)���íú
5)æT┴┐▒╚╩╟╦┼╖■δèÖC(j¿⌐)▀\(y¿┤n)▐D(zhu¿ún)╡─╙ï(j¿¼)╦π╗∙╡A(ch¿│)ú¼┤╦╓╡ä╒(w¿┤)▒╪╒²┤_���úí
c)p1-46 pg╖╓╓▄▒╚àóö╡(sh¿┤)╘O(sh¿¿)╢¿║═p1-72╣ΓîW(xu¿ª)│▀Θ]¡h(hu¿ón)╜Γ╬÷╢╚╘O(sh¿¿)╢¿
p1-46₧Θ╦┼╖■≥î(q¿▒)ä╙(d¿░ng)╞≈cn1╫╘╔φ▌ö│÷╡╜┴φ╥╗εw═¼≥î(q¿▒)≥î(q¿▒)ä╙(d¿░ng)╞≈╡─cn5╡─╛Ä┤a╞≈╖┤≡ü╓╡��ú¼┤╦ö╡(sh¿┤)╓╡┤≤╨í║═╟░├µp1-44�íóp1-45▓óƒo(w¿▓)îì(sh¿¬)┘|(zh¿¼)╡─ΩP(gu¿ín)╧╡�ú¼₧Θ±R▀_(d¿ó)╫╘╔φ▌ö│÷╜Γ╬÷�����íú╘O(sh¿¿)╢¿ö╡(sh¿┤)╓╡╘╜┤≤�����ú¼╜Γ╬÷╘╜╕▀�ú¼╘╜╙╨└√²êΘT(m¿ªn)╡─┐╪╓╞ú¼╡½╩╟│¼│÷╥╗╢¿┐╪╓╞╡─╖╢ç·╡─╘Æ�����ú¼îó╙░φæâ╔▌SΘg╬╗╓├╒`▓ε╙ï(j¿¼)╦π╡─╒²┤_╨╘íú╧▐╓╞╣½╩╜₧Θú║±R▀_(d¿ó)▐D(zhu¿ún)╦┘í┬60xp1-46x4 < 8*1000,000�íú
p1-72₧ΘδèÖC(j¿⌐)╨²▐D(zhu¿ún)╥╗╚ªòr(sh¿¬)cn5æ¬(y¿⌐ng)╘ô╜╙╩╒╡╜╢α╔┘ö╡(sh¿┤)╓╡����íú₧Θ4▒╢εl╓«║≤╡─ö╡(sh¿┤)╓╡ú¼╞Σö╡(sh¿┤)╓╡₧Θ┴φ╥╗εw╦┼╖■▌S╡─p1-46x4╡├╡╜╡─ö╡(sh¿┤)╓╡���íú┼e└²���ú¼╚τ▌Só┘╡─p1-46=10000pulseú¼ät▌Só┌╡─p1-72╧αæ¬(y¿⌐ng)╡╚╙┌ p1-72=2500x4=40000pulse�íú═¿│úâ╔éÇ(g¿¿)▌S╡─▀@â╔╜Màóö╡(sh¿┤)╥¬╘O(sh¿¿)╢¿╥╗╓┬����úí
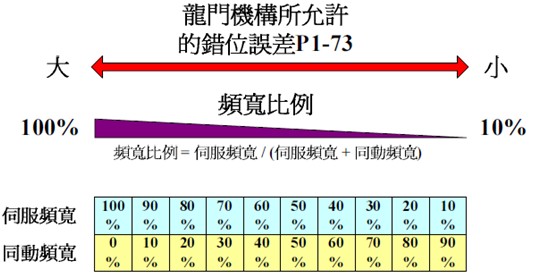
d)p1-73╣ΓîW(xu¿ª)│▀╚½Θ]¡h(hu¿ón)╗╪╩┌╬╗╓├�����íó±R▀_(d¿ó)╛Ä┤a╞≈╓«Θg╬╗╓├╒`▓ε▀^(gu¿░)┤≤╡─σe(cu¿░)╒`▒ú╫o(h¿┤)╖╢ç·╘O(sh¿¿)╢¿
«ö(d¿íng)╦┼╖■≥î(q¿▒)ä╙(d¿░ng)╞≈Å─cn5╜╙╩╒╡╜╡─┴φ╥╗≥î(q¿▒)ä╙(d¿░ng)╞≈ö╡(sh¿┤)╓╡┼c╫╘╔φ╛Ä┤a╞≈╜╙┐┌cn2╖┤≡üüφ(l¿ói)╡─ö╡(sh¿┤)╓╡▓ε╓╡╡╜╘ô╘O(sh¿¿)╢¿ö╡(sh¿┤)╓╡║≤�����ú¼≥î(q¿▒)ä╙(d¿░ng)╞≈╝┤░l(f¿í)╔·ale40ê≤(b¿ño)╛»�����ú¼╘┌╘O(sh¿¿)╢¿┤╦╓╡òr(sh¿¬)�ú¼ä╒(w¿┤)▒╪┐╝æ]îì(sh¿¬)δH╡─ÖC(j¿⌐)╨╡╜Y(ji¿ª)ÿï(g¿░u)╦∙─▄│╨╩▄â╔▌SΘg╡─σe(cu¿░)╬╗╒`▓ε�����ú¼╚τ╒`▓ε╓╡╘O(sh¿¿)╢¿│¼▀^(gu¿░)îì(sh¿¬)δHÖC(j¿⌐)╨╡╜Y(ji¿ª)ÿï(g¿░u)╦∙─▄│╨╩▄╡──▄┴ªú¼┐╔─▄ò■(hu¿¼)ôpë─ÖC(j¿⌐)╨╡╧╡╜y(t¿»ng)����úí╘╩╘S╒`▓ε╡─╣½╩╜╚τ╧┬ú║
▀Ç╥╘╔╧╩÷₧Θ└²ú¼p1-46=10000pulse���ú¼p1-72=40000pulse���íúp1-73=400pulseú¼╜zùU╡─┬▌╛α₧Θ10mm�����ú¼ätâ╔▌S╘╩╘S╡─╒`▓ε₧Θú║
400í┬40000x10=0.1mm����ú¼«ö(d¿íng)â╔▌S╒`▓ε▀_(d¿ó)╡╜0.1mmòr(sh¿¬)ú¼╦┼╖■╧╡╜y(t¿»ng)«a(ch¿ún)╔·ê≤(b¿ño)╛»╨┼╧óale40��íú
╨Φ╥¬╫ó╥Γ╡─╩╟▀@éÇ(g¿¿)╓╡╘O(sh¿¿)╢¿╘┌╘O(sh¿¿)╢¿òr(sh¿¬)▓ó╖╟╘╜╨í╘╜║├�ú¼▀Ç╥¬┐╝æ]â╔▌S╥≥?y¿ñn)Θ╪?f¿┤)▌d╟Θ¢r▓╗┐╔─▄═Ω╚½╧α═¼ú¼╘┌╝╙╦┘╗≥£p╦┘▀^(gu¿░)│╠╓╨�ú¼«a(ch¿ún)╔·▌^┤≤╡─═¼▓╜╒`▓ε�ú¼╥≥┤╦╥¬▒╗┐╝æ]����ú¼║≤└m(x¿┤)╒┬╣¥(ji¿ª)ò■(hu¿¼)├Φ╩÷����íú
e)═¼▓╜╘O(sh¿¿)╢¿Öz▓Θ
╩╣╙├a2-sfot▄¢╝■╩╛▓¿╞≈╣ª─▄
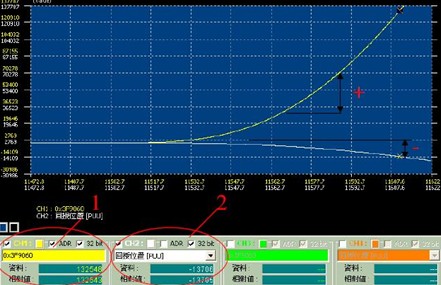
1)îó╩╛▓¿╞≈╧┬╖╜╡─ch1╡─adr╝░32bit╣┤▀xú¼▓ó╘┌ⁿS╕±â╚(n¿¿i)µI╚δ0x3f9060����ú¼┤╦╓╡₧Θ≥î(q¿▒)ä╙(d¿░ng)╞≈â╚(n¿¿i)▓┐╣ΓîW(xu¿ª)│▀cn5╡─╗╪╩┌├}▓¿┴┐ú¼┤╦╫âö╡(sh¿┤)₧Θ32╬╗╘¬ö╡(sh¿┤)╓╡ú¿▒O(ji¿ín)╥ò═¼ä╙(d¿░ng)≥î(q¿▒)ä╙(d¿░ng)╞≈╡─╥╞ä╙(d¿░ng)╖╜╧≥ú⌐�íú
2)îóch2╡─32bit╣┤▀xú¼▓ó╘┌░╫╔½╖╜╕±â╚(n¿¿i)▀xô±í░╗╪╩┌╬╗╓├í▒���ú¼┤╦₧Θ±R▀_(d¿ó)▒╛╔φ╗╪╩┌╡─├}▓¿┴┐ú¿▒O(ji¿ín)╥ò▀B╜╙╡╜╩╛▓¿╞≈╓«≥î(q¿▒)ä╙(d¿░ng)╞≈╡─╥╞ä╙(d¿░ng)╖╜╧≥ú⌐�íú
3)├ⁿ┴ε╔╧╬╗┐╪╓╞╞≈╧┬▀_(d¿ó)╬╗╓├├ⁿ┴ε�����ú¼╩╣â╔εw±R▀_(d¿ó)═¼òr(sh¿¬)╥╞ä╙(d¿░ng)ú¼▓ó╙^▓∞pc╩╛▓¿╞≈╡─╫â╗»����ú¼╙ì╠û(h¿ño)╚τ╧┬êD�ú¼ch1┼cch2╘÷╝╙┴┐╩╟╧α╖┤╡─ú¼╚τ▓╗îócn5╡─▌ö╚δ╨┼╠û(h¿ño)╖┤╧≥����ú¼╓╗╥¬²êΘT(m¿ªn)═¼ä╙(d¿░ng)┐╪╓╞╥╗åóä╙(d¿░ng)ú¼╛═ò■(hu¿¼)±R╔╧«a(ch¿ún)╔·â╔▌S╬╗╓├╒`▓ε▀^(gu¿░)┤≤╡─╛»ê≤(b¿ño)ú¼╚⌠îó▒╛ÖC(j¿⌐)╔╧╡─p1-74╘O(sh¿¿)╢¿╕─₧Θ10x��ú¼╝┤┐╔îócn5╜╙╩╒╡╜╡─╗╪╩┌╨┼╠û(h¿ño)îó╖┤╧α�íú
1) ╚τ╣√╘O(sh¿¿)╢¿╒²┤_��ú¼╙ì╠û(h¿ño)ò■(hu¿¼)╚τ═¼╧┬êD�����ú¼╘÷╝╙┴┐╩╟═¼╧≥╡─��íúú¿êD╓╨ⁿS╔½╡─ΣŲX╙ì╠û(h¿ño)����ú¼î┘╒²│��ú¼F(xi¿ñn)╧≤�ú¼╥≥?y¿ñn)Θ┐╪╓╞╞≈â?n¿¿i)▓┐�����ú¼₧Θ▒▄├Γ╥τ╬╗�����ú¼ê╠(zh¿¬)╨╨ö╡(sh¿┤)╓╡╓╪╓├╡─ä╙(d¿░ng)╫≈ú⌐
2) ═Ω│╔║≤����ú¼îó╩╛▓¿╞≈╜╙╡╜┴φ╥╗┼_(t¿ói)≥î(q¿▒)ä╙(d¿░ng)╞≈ú¼▓∞┐┤┴φ╥╗┼_(t¿ói)├}▓¿╗╪╩┌╧α╬╗╩╟╖±╒²┤_����íú
a) ╘ç▀\(y¿┤n)▐D(zhu¿ún)╥╘╝░P1-73 ╒`▓ε╓╡╡─╨▐╒²
╩╣╙├A2-sfot▄¢╝■╘÷╥µ╙ï(j¿¼)╦π╣ª─▄ú¼â╔┼_(t¿ói)╦┼╖■≥î(q¿▒)ä╙(d¿░ng)╞≈╧╚╘O(sh¿¿)╢¿╧α═¼╡─╦┼╖■εlîÆ╘O(sh¿¿)╢¿�����ú¼╥╘▒▄├Γâ╔▌S╘÷╥µàóö╡(sh¿┤)╘O(sh¿¿)╢¿▓╗╥╗╓┬╢°╥²╞≡±R▀_(d¿ó)╖┤æ¬(y¿⌐ng)╦┘╢╚▓╗═¼���ú¼«a(ch¿ún)╔·▌^┤≤╡─╒`▓ε���íú
╩╣╙├A2-sfot▄¢╝■╩╛▓¿╞≈╣ª─▄
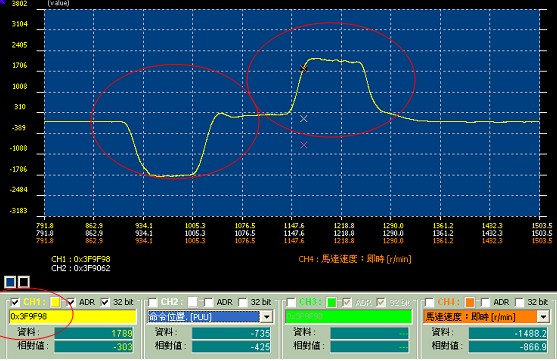
╘O(sh¿¿)╢¿▀m«ö(d¿íng)?sh¿┤)─╦┼╖■εlîÆ║≤ú¿╙╔╨í╡╜┤≤╒{(di¿ño)╒√ú⌐��ú¼╫î╔╧╬╗┐╪╓╞╞≈╧┬▀_(d¿ó)╬╗╓├├ⁿ┴ε���ú¼▓ó═╕▀^(gu¿░)PC▄¢╝■╩╛▓¿╞≈��ú¼╙^▓∞â╔▌S╓«Θg╡─╬╗╓├╒`▓ε╝░═¼▓╜╟Θ╨╬����íú╚τ╧┬êD╘O(sh¿¿)╢¿���ú¼╣┤▀xCH1,ADR╝░32BIT��ú¼▓ó▌ö╚δ╬╗╓╖0x3f9f98�����ú¼┤╦ö╡(sh¿┤)╓╡₧Θâ╔▌S╓«Θg╡─╬╗╓├╒`▓ε┴┐��ú¼å╬╬╗₧ΘPULSE���ú¼â╔▌SΘg╚⌠╬╗╓├╒`▓ε┴┐┤≤▀^(gu¿░)╘O(sh¿¿)╢¿╓╡P1-73ú¼ätò■(hu¿¼)«a(ch¿ún)╔·ê≤(b¿ño)╛»íú╦∙╥╘╔╧╬╗┐╪╓╞╞≈╫ε║≤╜o╢¿╡─╝╙£p╦┘╓╕┴ε�ú¼▒╪φÜ╒{(di¿ño)╒√╡╜╦┼╖■╘┌╝╙£p╦┘▀^(gu¿░)│╠╓╨ú¼─▄ë≥¥M╫π0x3f9f98<P1-73òr(sh¿¬)▓┼▓╗ò■(hu¿¼)░l(f¿í)╔·åû(w¿¿n)ε}íú
b) P1-74²êΘT(m¿ªn)═¼▓╜╣ª─▄╡─Θ_(k¿íi)åó
«ö(d¿íng)╔╧╩÷àóö╡(sh¿┤)Öz▓Θ║═╘O(sh¿¿)╢¿═Ω«à║≤����ú¼îóàóö╡(sh¿┤)P1-74╘O(sh¿¿)╢¿╡╚╙┌2╝┤┐╔îì(sh¿¬)¼F(xi¿ñn)²êΘT(m¿ªn)═¼≥î(q¿▒)╣ª─▄�íú
c) P2-57═¼▓╜╘÷╥µεlîÆ╡─╘O(sh¿¿)╢¿
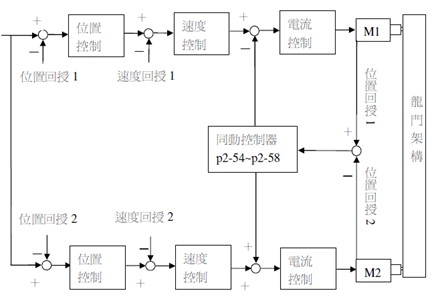
«ö(d¿íng)╩╣╙├╓╨░l(f¿í)¼F(xi¿ñn)â╔▌S═¼▓╜║≤ú¼╕·δS╒`▓ε▀Ç╩╟▌^┤≤òr(sh¿¬)�ú¼╜¿╫h▀m«ö(d¿íng)?sh¿┤)─╘÷╝╙P2-57╡─ö╡(sh¿┤)╓╡�ú¼╘ôö╡(sh¿┤)╓╡₧Θ═¼▓╜┐╪╓╞εlîÆú¼╘O(sh¿¿)╢¿╘ôö╡(sh¿┤)╓╡║≤ú¼╧╡╜y(t¿»ng)ò■(hu¿¼)╫╘ä╙(d¿░ng)╡─╙ï(j¿¼)╦π│÷P2-54~P2-58╡╚╥╗╧╡┴╨═¼▓╜εlîÆPID╒{(di¿ño)╣¥(ji¿ª)àóö╡(sh¿┤)��íú┤╦ö╡(sh¿┤)╓╡╘O(sh¿¿)╢¿╘╜┤≤���ú¼╞Σâ╔▌S═¼▓╜╡─╨º╣√╛═╘╜║├�����íú
╡½╩╟╨Φ╥¬╫ó╥Γ╡─╩╟ú¼«ö(d¿íng)╧╡╜y(t¿»ng)╡─╦┘╢╚¡h(hu¿ón)εlîÆ+═¼ä╙(d¿░ng)┐╪╓╞εlîÆ>╧╡╜y(t¿»ng)╫╘╔φ╡─╘╩╘SεlîÆòr(sh¿¬)�ú¼ÖC(j¿⌐)ÿï(g¿░u)╛═ò■(hu¿¼)╣▓╒±«a(ch¿ún)╔·ç[╜╨��ú¼╥≥┤╦╘┌╒{(di¿ño)╒√═¼ä╙(d¿░ng)εlîÆòr(sh¿¬)���ú¼╥¬╙╔╨í╡╜┤≤┬²┬²╡─╒{(di¿ño)╒√úí
4. ╞Σ╦√╥≥╦╪îª(du¿¼)═¼▓╜╛½╢╚╡─╙░φæ
îª(du¿¼)╙┌╧┬╩÷åû(w¿¿n)ε}╩╟╥╗éÇ(g¿¿)╩«╖╓╙╨▒╪╥¬╙æ╒ô╡─åû(w¿¿n)ε}���ú¼╬╥éâ?c¿¿)┌î?sh¿¬)δH╒{(di¿ño)╘çòr(sh¿¬)░l(f¿í)¼F(xi¿ñn)╥╘╧┬åû(w¿¿n)ε}îª(du¿¼)═¼▓╜╛½╢╚╞≡╙░φæ╫≈╙├����ú¼╔⌡╓┴╙╨òr(sh¿¬)╫≤╙╥╡╜╖╜░╕╡─╜Y(ji¿ª)╣√��íú
1) â╔┼_(t¿ói)≥î(q¿▒)ä╙(d¿░ng)╞≈¢](m¿ªi)╙╨░▓╤b╘┌═¼╥╗éÇ(g¿¿)╜≡î┘î╙░σ���ú¼îº(d¿úo)╓┬▓╗─▄╡╚δè╬╗�����ú¼╥²╞≡≥î(q¿▒)ä╙(d¿░ng)╞≈CN5├}¢_╩▄╕╔ö_íú
îì(sh¿¬)δH╫C├≈░l(f¿í)¼F(xi¿ñn)�ú¼╙╨╨⌐┐═æ⌠╡─≥î(q¿▒)ä╙(d¿░ng)╞≈░▓╤b╘┌─z─╛░σ╔╧╗≥╒▀îó╜≡î┘╡╫░σçè╞ßú¼«ö(d¿íng)▓╔╙├╡─╡╫╛Ç▓╗ë≥╥Ä(gu¿⌐)╕±òr(sh¿¬)��ú¼═¼òr(sh¿¬)▒O(ji¿ín)┐╪â╔┼_(t¿ói)≥î(q¿▒)ä╙(d¿░ng)╞≈��ú¼╞Σ╓╨╥╗┼_(t¿ói)╛Ä┤a╞≈╗╪╩┌▓╗╘÷╝╙�����ú¼╡½╩╟┴φ╥╗┼_(t¿ói)≥î(q¿▒)ä╙(d¿░ng)╞≈╡─3F9060╡╪╓╖╬╗ö╡(sh¿┤)╓╡às▓╗öα╫â╗»�ú¼∩@╩╛╙╨├}¢_▀M(j¿¼n)╚δú¼▀@╛═╩╟δs╙ì╕╔ö_╥²╞≡����íú
╜Γ¢Q╡─╖╜╖¿╩╟ú║
A. £p╔┘CN5╡╜CN1╡─╜╙╛ÇΘL(zh¿úng)╢╚ú¼▓╔╙├╞┴▒╬δp╜g╛Ç�íú
B. ╩╣╙├╜≡î┘╡╫░σíú
C. ▓╔╙├┴╝║├║═╒²┤_╡─╜╙╡╪��ú¼╗≥╒▀îóâ╔εw╦┼╖■╜╙╡╪╢╦╫╙�ú¼╩╣╙├╜≡î┘π~╛Ä┐ùĺ┐τ╜╙íú
2) â╔▌S═¼▓╜òr(sh¿¬)ÖC(j¿⌐)╨╡╩╣╙├╜zùU║═²X▌å²Xùl╡─╨º╣√▓ε«É���íú
«ö(d¿íng)▓╔╙├╜zùUé≈ä╙(d¿░ng)╜Y(ji¿ª)ÿï(g¿░u)òr(sh¿¬)�����ú¼ÖC(j¿⌐)╨╡╡─äé╨╘▌^╕▀���ú¼╥≥┤╦┐╔╥╘½@╡├▌^║├╡─═¼▓╜╨º╣√ú¼╢°╩╣╙├²X▌å²Xùlòr(sh¿¬)�ú¼╨Φ╥¬â╔▀à²Xùlç└(y¿ón)╕±îª(du¿¼)╬╗ú¼▀@ÿ╙îª(du¿¼)░▓╤b╙╨┴╦▌^╕▀╡─╥¬╟≤��ú¼╝╙╔╧²X▌åé≈ä╙(d¿░ng)╡─Θg╧╢åû(w¿¿n)ε}����ú¼╦∙╥╘╜Y(ji¿ª)ÿï(g¿░u)äé╨╘▓╗╚τ╜zùU���ú¼═¼▓╜╨º╣√╥▓ò■(hu¿¼)▓ε╨⌐ú¼╡½▀@╩╟ÖC(j¿⌐)╨╡╜Y(ji¿ª)ÿï(g¿░u)╠╪ⁿc(di¿ún)¢Q╢¿╡─�ú¼╦┼╖■δèÖC(j¿⌐)╘┌δèÜΓ╔╧╚╘▒ú│╓╕▀╛½╢╚╡─╬╗╓├═¼▓╜íú
5. ╜Y(ji¿ª)╩°╒Z(y¿│)
▒╛░╕╓╗╩╟A2╕▀╜Γ╬÷╓╟─▄╦┼╖■²êΘT(m¿ªn)═¼≥î(q¿▒)╣ª─▄╡─╥╗éÇ(g¿¿)╡Σ╨═æ¬(y¿⌐ng)╙├����íú─┐╟░A2╧╡┴╨╦┼╖■│²²êΘT(m¿ªn)═¼≥î(q¿▒)╣ª─▄═Γú¼╞Σ╦√╧╡┴╨ÖC(j¿⌐)╨═▀Ç░ⁿ║¼╙╨CAN-OPEN┐é╛ÇÖC(j¿⌐)╨═���ú¼╚½Θ]¡h(hu¿ón)ÖC(j¿⌐)╨═��ú¼╥╘╝░öU(ku¿░)╒╣I/OÖC(j¿⌐)╨═����ú¼┐╔╥╘¥M╫π▓╗═¼æ¬(y¿⌐ng)╙├ê÷(ch¿úng)║╧║═┐╪╓╞╨Φ╟≤�ú¼╧α╨┼δS╓°╩╨ê÷(ch¿úng)╡─▓╗öα╔ε╚δú¼╬╥éâ┐╔╥╘₧Θ┐═æ⌠îì(sh¿¬)¼F(xi¿ñn)╕ⁿ╖Ç(w¿ºn)╢¿����íó╕▀╨╘?x¿▓n)r(ji¿ñ)▒╚╡─╦┼╖■▀\(y¿┤n)ä╙(d¿░ng)┐╪╓╞┐╪╓╞╖╜░╕íú