ЎЎЎЎ2005Дкй_(kЁЎi)КјЈ¬ОТҮш(guЁ®)өД°l(fЁЎ)лҠРРҳI(yЁЁ)ұгГжЕRГә»ДҢ§(dЁЈo)ЦВөДлҠ»ДЎЈИзҪсЈ¬ГәлҠҺ§Ғн(lЁўi)өДӯh(huЁўn)ҫіОЫИҫ�ЎўИ«ЗтЧғЕҜТФј°ОТҮш(guЁ®)іР“ъ(dЁЎn)өДңpЕЕИО„Х(wЁҙ)¶јЖИК№ОТӮғұШнҡҢӨЗуҪвӣQлҠФҙА§ҫЦЦ®өАЈ¬Х{(diЁӨo)ХыДЬФҙҪY(jiЁҰ)ҳӢ(gЁ°u),ғһ(yЁӯu)ПИ°l(fЁЎ)Х№пL(fЁҘng)лҠ���ЎўМ«к–(yЁўng)ДЬ°l(fЁЎ)лҠәНЙъОпЩ|(zhЁ¬)ДЬ°l(fЁЎ)лҠКЗ¬F(xiЁӨn)ҪсјјРg(shЁҙ)—lјюПВөДЧојСЯx“сЎЈұҫЖ¬°ёАэКЗһйМ«к–(yЁўng)ДЬ№в·ьлҠіШёІЙwд“»ҜІЈБ§°еБчЛ®ҫҖ(xiЁӨn)ЧчҳI(yЁЁ)ҙтҝЧ���Ј¬ФO(shЁЁ)ӮдјУ№Өҫ«¶И�����Ј¬Р§ВКТӘЗуёЯ����Ј¬ФЪІ»ҪөөНРФДЬөДЗ°МбПВ���Ј¬ЧоҙуіМ¶ИөДҝШЦЖБЛіЙұҫ��ЎЈ
ЎЎЎЎ1 ФO(shЁЁ)ӮдёЕӣr
ЎЎЎЎИ«ЧФ„У(dЁ°ng)ІЈБ§ҙтҝЧҷC(jЁ©)°ьә¬6оwЛЕ·ю�Ўў¶ЁО»ЭSЎўX1ј°X2ЛНБПЭS����ЎўYЭSЎўZ1ЭS��ЎўZ2ЭS��ЎЈҫЯуwИзҲD1ЛщКҫ����ЎЈ
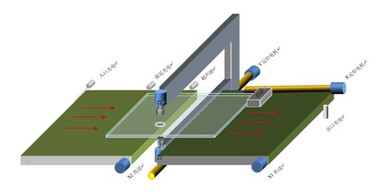
ЎЎЎЎҲD1 И«ЧФ„У(dЁ°ng)ҙтҝЧҷC(jЁ©)КҫТвҲD
ЎЎЎЎЈЁ1Ј©¶ЁО»ЭSЈәЯxУГІЈБ§ҫ«ҙ_¶ЁО»ЈЁB2ЛЕ·ю*1Ј©�Ј¬Ҫӣ(jЁ©ng)ңpЛЩҷC(jЁ©)әуУЙҪzёЬӮч„У(dЁ°ng)ЎЈУӢ(jЁ¬)ЛгҙтҝЧьc(diЁЈn)өҪІЈБ§Я…СШҫалx���Ј¬¶ЁО»өҪО»ЦГәу�Ј¬·ЕПВ?liЁўn)хүK�Ј¬ҢҚ(shЁӘ)¬F(xiЁӨn)ІЈБ§°еөДҫ«ҙ_¶ЁО»Ј»
ЎЎЎ�ЎЈЁ2Ј©XЭSЈәІЈБ§ӮчЛНЈЁB2ЛЕ·ю*2Ј©Ј¬Ҫӣ(jЁ©ng)ңpЛЩҷC(jЁ©)әуЦұҪУтҢ(qЁұ)„У(dЁ°ng)ЎЈёЯДҰІББҰӮчЛНҺ§����Ј¬Н¬•r(shЁӘ)ЕдәПүәҠAСbЦГЈ¬ұЈЧCІЈБ§°еӮчЛН·ҪПт��Ј¬ӮчЛНҺ§өДО»ЦГәНЛЩ¶ИУЙЗ°әуғЙӮҖ(gЁЁ)ЛЕ·юҝШЦЖ�Ј¬НЁЯ^(guЁ°)УӢ(jЁ¬)ЛгҙтҝЧьc(diЁЈn)өҪІЈБ§Я…ҫүөДО»ЦГЈ¬ӮчЛНҺ§¶ЁО»өҪҢҰ(duЁ¬)‘Ә(yЁ©ng)В·ҸҪО»ЦГ�Ј»
ЎЎЎЎЈЁ3Ј©YЭSЈәҙтҝЧг@о^¶ЁО»ЈЁA2ЛЕ·ю*1Ј©����Ј¬Ҫӣ(jЁ©ng)ңpЛЩҷC(jЁ©)әуУЙҪzёЬӮч„У(dЁ°ng)�����ЎЈг@о^°ІСbФЪYЭSЙП����Ј¬ёщ“ю(jЁҙ)YЧшҳЛ(biЁЎo)ьc(diЁЈn)Ј¬УӢ(jЁ¬)ЛгҙтҝЧьc(diЁЈn)өҪІЈБ§Я…ҫүөДҫалx�Ј¬ҝШЦЖYЭSөДО»ЦГәНЛЩ¶ИөҪЯ_(dЁў)Цё¶ЁҙтҝЧьc(diЁЈn)Ј»
ЎЎЎ�����ЎЈЁ4Ј©Z1ЎўZ2Јәг@о^ЯM(jЁ¬n)Ҫo¶ЁО»ЈЁA2ЛЕ·ю*2Ј©�Ј¬Ҫӣ(jЁ©ng)УЙҙуРЎЭҶј°ҪzёЬӮч„У(dЁ°ng)���ЎЈYЭS¶ЁО»әу��Ј¬ПВг@о^Э^ёЯЛЩ¶И1ҪУҪьІЈБ§ұнГж����Ј¬ФЩТФЛЩ¶И2ЯM(jЁ¬n)РРҫалx1өДө№Я…Ј¬ФЩТФЛЩ¶И3ЯM(jЁ¬n)РРҫалx2№ҘЯM(jЁ¬n)��Ј¬ЧоәуТФЛЩ¶И4ВэЛЩНЛө¶�Ј»ПВг@о^НЛө¶әуЙПг@ЯM(jЁ¬n)РРЕcПВг@оҗ(lЁЁi)ЛЖөД„У(dЁ°ng)ЧчНкіЙҙтҝЧЎЈ

ЎЎЎЎҲD2 XЭS“хүK

ЎЎЎЎҲD3 YЭSј°ZЭS
ЎЎЎЎ2 јјРg(shЁҙ)…ў”ө(shЁҙ)
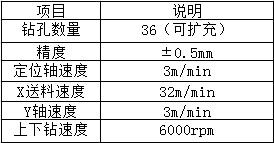
ЎЎЎЎ2.1 ФO(shЁЁ)ӮдЦёҳЛ(biЁЎo)
ФO(shЁЁ)ӮдЦёҳЛ(biЁЎo)Изұн1ЛщКҫ��ЎЈ
ЎЎЎЎұн1 ФO(shЁЁ)ӮдЦёҳЛ(biЁЎo)
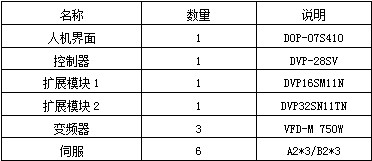
ЎЎЎЎ2.2 УІјюЗеҶО
ЎЎЎЎУІјюЗеҶОИзұн2ЛщКҫ��ЎЈ
ЎЎЎЎұн2 УІјюЗеҶО
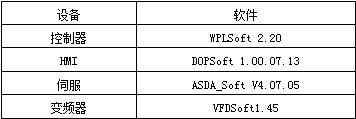
ЎЎЎЎ2.3 ЬӣјюЗеҶО
ЎЎЎЎЬӣјюЗеҶОИзұн3ЛщКҫ���ЎЈ
ЎЎЎЎұн3 ЬӣјюЗеҶО
ЎЎЎЎ3 ЭoЦъ№ӨҫЯ
ЎЎЎЎЭoЦъ№ӨҫЯИзұн4ЛщКҫ����ЎЈ
ЎЎЎЎұн4 ЭoЦъ№ӨҫЯ

ЎЎЎЎ4 №ӨЛҮХf(shuЁӯ)Гч
ЎЎЎЎ4.1 ¶ЁО»ЭS
ЎЎЎЎ¶ЁО»ЭSК№УГB2ЛЕ·ютҢ(qЁұ)„У(dЁ°ng)Ј¬ҝШЦЖЙПІЙУГҪ^ҢҰ(duЁ¬)Цө¶ЁО»DDRVA���ЎЈҙ_¶Ё»щңК(zhЁіn)әу�Ј¬ІЙУГҪ^ҢҰ(duЁ¬)Цө¶ЁО»ҝЙТФм`»о¶ЁО»өҪЦё¶ЁО»ЦГ�Ј¬ұЬГвТ»¶ЁБҝөД”ө(shЁҙ)ҢW(xuЁҰ)УӢ(jЁ¬)ЛгЈ»®”(dЁЎng)Т»ҙО¶ЁО»НкіЙ�����Ј¬й_(kЁЎi)КјҙтҝЧәу���Ј¬ұгЯM(jЁ¬n)РРПВТ»ӮҖ(gЁЁ)ҝЧО»ЦГөДұИЭ^�����Ј¬Из№ыXЧшҳЛ(biЁЎo)ПаН¬„tІ»РиТӘФЩҙО¶ЁО»Ј¬XЧшҳЛ(biЁЎo)І»Н¬�Ј¬„tЯM(jЁ¬n)РРПВТ»ҙО¶ЁО»Ј¬¶ЁО»өҪО»З°·ЕПВ?liЁўn)хүK�Ј¬ВэЛЩЯM(jЁ¬n)ИлоA(yЁҙ)¶ЁО»ЦГҙэГьЈ»ЧоәуТ»ӮҖ(gЁЁ)ҝХ¶ЁО»НкіЙәу���Ј¬КХЖр“хүK¶ЁО»ЦБөЪТ»ҝЧО»ЦГ��Ј¬өИҙэІЈБ§ЛНіцәу·ЕПВ?liЁўn)хүK����ЎЈ
ЎЎЎЎ4.2 YЭS
ЎЎЎЎYЭSК№УГA2ЛЕ·ютҢ(qЁұ)„У(dЁ°ng)Ј¬ҝШЦЖЙПІЙУГҪ^ҢҰ(duЁ¬)Цө¶ЁО»DDRVA�����ЎЈТт?yЁӨn)йYЭSЙПУРІЈБ§ҠAіЦүәұP(pЁўn)��Ј¬ЛщТФY¶ЁО»»тЦШРВ¶ЁО»З°үәұP(pЁўn)ұШнҡҪвіэ����Ј»ҝЧөДYЧшҳЛ(biЁЎo)ЕcПВТ»ӮҖ(gЁЁ)ПлН¬•r(shЁӘ)Ј¬Ц»РиТӘүәұP(pЁўn)���Ўўүәҫo��Ўў¶ЁО»әНЛНБП„У(dЁ°ng)Ччәу�����Ј¬јҙҝЙТФҙтҝЧ�����ЎЈ
ЎЎЎЎ4.3 X1���ЎўX2
ЎЎЎЎX1���ЎўX2К№УГғЙЕ_(tЁўi)B2ЛЕ·ю·Ц„eтҢ(qЁұ)„У(dЁ°ng)Ј¬ҝШЦЖЙПІЙУГФцБҝКҪ¶ЁО»�Ј¬·ЦЛНБПәуәНЛНБПЗ°ғЙІҝ·ЭЎЈЛНБПЯ^(guЁ°)і¬В•ІЁәу�Ј¬X2І»РиТӘН¬ІҪЛНБПЈ¬Я@•r(shЁӘ)ТӘёЯЛЩСa(bЁі)БПөҪі¬В•ІЁЗ°№влҠО»ЦГ���Ј¬ТФМбёЯ№ӨЧчР§ВК�Ј»ЛНБПөҪі¬В•ІЁәу���Ј¬ТФТ»°гЛЩ¶ИТЖ„У(dЁ°ng)�����Ј¬®”(dЁЎng)ҪУҪьЦБТ»¶Ёҫалx•r(shЁӘ)Ј¬ФЩТФВэЛЩҪУҪь--ЧоәуЩNЙП“хүK�ЎЈ
ЎЎЎЎ4.4 Z1ЎўZ2г@о^О»ЦГ¶ЁО»
ЎЎЎЎZ1�ЎўZ2К№УГғЙЕ_(tЁўi)A2ЛЕ·ю·Ц„eтҢ(qЁұ)„У(dЁ°ng)�����Ј¬ҝШЦЖЙПІЙУГPRУ|°l(fЁЎ)Ғн(lЁўi)ҝШЦЖг@о^О»ЦГ����ЎЈО»ЦГ1ЈЁ6-03Ј©���Ј¬ёЯЛЩЈЁ5-60Ј©ҪУҪьО»ЦГ1��Ј»О»ЦГ2ЈЁ6-05Ј©��Ј¬ЛЩ¶И1ЈЁ5-61Ј©№ҘЯM(jЁ¬n)1��Ј»О»ЦГ3ЈЁ6-07Ј©����Ј¬ЛЩ¶И2ЈЁ5-62Ј©№ҘЯM(jЁ¬n)2��Ј»О»ЦГ4ЈЁ6-09Ј©��Ј¬ЛЩ¶И3ЈЁ5-63Ј©НЛө¶�Ј»Тт?yЁӨn)йІЈБ§әс¶ИІ»Н¬Ј¬І»Н¬Т?guЁ©)ёсөДІЈБ§өДг@о^№ҘЯM(jЁ¬n)1О»ЦГ����Ј¬№ҘЯM(jЁ¬n)2өДО»ЦГРиТӘЯM(jЁ¬n)РРХ{(diЁӨo)Хы�����Ј¬ҙЛ•r(shЁӘ)���Ј¬ҢҰ(duЁ¬)‘Ә(yЁ©ng)PRВ·ҸҪ…ў”ө(shЁҙ)НЁЯ^(guЁ°)НЁУҚРЮёДЈ¬ТФқM(mЁЈn)ЧгјУ№ӨРиЗу��ЎЈ
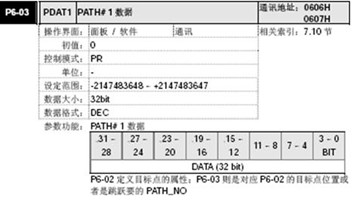
ЎЎЎЎҲD4 PR…ў”ө(shЁҙ)
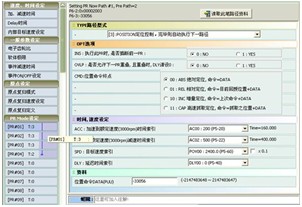
ЎЎЎЎҲD5 НЁЯ^(guЁ°)ЬӣјюТҺ(guЁ©)„қPRВ·ҸҪ
ЎЎЎЎНЁЯ^(guЁ°)Delta ASDA-Soft ТҺ(guЁ©)„қPRВ·ҸҪ�����Ј¬К№УГҪ^ҢҰ(duЁ¬)Цө¶ЁО»�����Ј¬ТҺ(guЁ©)„қјУЛЩәНңpЛЩ•r(shЁӘ)йgТФј°ДҝҳЛ(biЁЎo)ЛЩ¶ИЛчТэ����Ј»РиТӘРЮёДВ·ҸҪ•r(shЁӘ)Ј¬НЁЯ^(guЁ°)НЁУҚРЮёДҢҰ(duЁ¬)‘Ә(yЁ©ng)В·ҸҪөД…ў”ө(shЁҙ)ЈЁАэИз06-03ҢҰ(duЁ¬)‘Ә(yЁ©ng)В·ҸҪ1өДО»ЦГГьБоDATAЈ©�ЎЈ
ЎЎЎЎ5 №ӨЛҮБчіМҲD
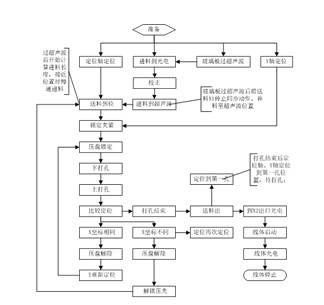
ЎЎЎЎҲD6 №ӨЛҮБчіМҲD
ЎЎЎЎФЪіМРтФO(shЁЁ)УӢ(jЁ¬)ЦР��Ј¬Тт?yЁӨn)й№ӨЛҮҙ©ІеұИЭ^м`»оЈ¬ЛщТФЯx“сЕ_(tЁўi)Я_(dЁў)ІҪЯM(jЁ¬n)іМРтЯM(jЁ¬n)РРФO(shЁЁ)УӢ(jЁ¬)��Ј¬ҢўХыМЧФO(shЁЁ)ӮдөД„У(dЁ°ng)ЧчЯM(jЁ¬n)РРјҡ(xЁ¬)·Ц��Ј¬ФЪГҝӮҖ(gЁЁ)ІҪЦРФO(shЁЁ)УӢ(jЁ¬)Әҡ(dЁІ)БўөДҝШЦЖ„У(dЁ°ng)Чч��Ј¬Я@ҳУҝЙТФәЬәГөШМбёЯ№ӨЧчР§ВК���Ј»іэТФЙПБчіМЦРөД№ҰДЬНв��Ј¬ФO(shЁЁ)ӮдЦРЯҖУРқҷ(rЁҙn)»¬№ҰДЬ�ЎўРЮг@№ҰДЬ�ЎўРЮУҶ»щңК(zhЁіn)ЎўВэЛЩЗ°ЯM(jЁ¬n)��ЎўВэЛЩәуНЛ����Ј¬Я@Р©„У(dЁ°ng)ЧчТт?yЁӨn)й»щУЪІҪЯM(jЁ¬n)өДЛјВ·ФO(shЁЁ)УӢ(jЁ¬)Ј¬ЛщТФҝЙТФм`»оөДҙ©ІеФЪіМРтЦР���ЎЈ
ЎЎЎЎАэИз�Ј¬®”(dЁЎng)¶ЁО»ЛЕ·юлҠҷC(jЁ©)НкіЙЧоәуТ»ҙО¶ЁО»�Ј¬Н¬•r(shЁӘ)ФO(shЁЁ)Ӯдй_(kЁЎi)КјҙтҝЧәу�Ј¬¶ЁО»лҠҷC(jЁ©)РиТӘәуНЛТ»¶Ёҫалx����Ј¬ФЩ¶ЁО»өҪөЪТ»ӮҖ(gЁЁ)ҝЧЗ°Т»¶ЁО»ЦГЈ¬өИҙэҙтҝЧНкіЙ�����Ј¬И»әуҢўІЈБ§ЛНіцТ»¶Ёҫалxәу�Ј¬ФЩ°С¶ЁО»“хүK·ЕПВЈ¬ЧоәуВэЛЩҝҝҪьөЪТ»ӮҖ(gЁЁ)ҝЧөД¶ЁО»О»ЦГ�����ЎЈЯ@АпТт?yЁӨn)йІЙУГІҪЯM(jЁ¬n)іМРтФO(shЁЁ)УӢ(jЁ¬)�����Ј¬Я@Іҝ·ЦіМРтӘҡ(dЁІ)БўБчіМФO(shЁЁ)УӢ(jЁ¬)���Ј¬РОіЙТ»ӮҖ(gЁЁ)ҢЈ(zhuЁЎn)йT(mЁҰn)өДБчіМҝШЦЖ»ШВ·��Ј¬ҫНҝЙТФәЬИЭТЧҢҚ(shЁӘ)¬F(xiЁӨn)����Ј¬УЦІ»•ю(huЁ¬)У°н‘ФӯУРҝШЦЖөДЯүЭӢБчіМЎЈ
ЎЎЎЎ6 ПөҪy(tЁҜng)УІјюҪY(jiЁҰ)ҳӢ(gЁ°u)
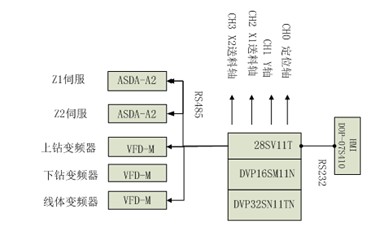
ЎЎЎЎҲD7 ҪY(jiЁҰ)ҳӢ(gЁ°u)КҫТвҲD

ЎЎЎЎҲD8 ПөҪy(tЁҜng)ҢҚ(shЁӘ)лHІјЦГ
ЎЎЎЎАыУГ28SVөД4В·200KёЯЛЩГ}ӣ_·Ц„eҝШЦЖ¶ЁО»ЭS���ЎўYЭSЎўX1ЛНБП�����ЎўX2ЛНБПЛДӮҖ(gЁЁ)ЛЕ·ю�Ј»Н¬•r(shЁӘ)АыУГ28SVөДCOM2НЁУҚҝЪНЁЯ^(guЁ°)485НЁУҚЈ¬ЕcZ1�����ЎўZ2ЯM(jЁ¬n)РРНЁУҚ����Ј¬РЮёДPRО»ЦГ…ў”ө(shЁҙ)әНЛЩ¶И…ў”ө(shЁҙ)Ј»Еc3Е_(tЁўi)ЧғоlЖчЯM(jЁ¬n)РРНЁУҚ�����Ј¬РЮёДЧғоlЖчөДоlВК…ў”ө(shЁҙ)��ЎЈ
ЎЎЎЎ7 HMIҪзГж

ЎЎЎЎҲD9 HMI
ЎЎЎЎHMIКЧн“(yЁЁ)п@КҫҙтҝЧ”ө(shЁҙ)БҝәНФO(shЁЁ)ӮдЯ\(yЁҙn)РР оӣrЎЈФO(shЁЁ)ЦГҝЧ”ө(shЁҙ)әуЈЁҙ_¶ЁҝЧҫа…ў”ө(shЁҙ)НЁЯ^(guЁ°)ЖдЛын“(yЁЁ)ГжНкіЙЈ©����Ј¬НЁЯ^(guЁ°)ҝШЦЖ№сГж°е°ҙвoҶў„У(dЁ°ng)й_(kЁЎi)КјҙтҝЧЎЈ

ЎЎЎЎҲD10 ФO(shЁЁ)Ӯд…ў”ө(shЁҙ)
ЎЎЎЎФЪ…ў”ө(shЁҙ)ФO(shЁЁ)ЦГҪзГж�Ј¬УГ‘ф(hЁҙ)ФO(shЁЁ)ЦГёчЭSөДҷC(jЁ©)РөСa(bЁі)ғ”ј°•r(shЁӘ)йg…ў”ө(shЁҙ)Ј»ІЈБ§ЛНіцҫалxКЗ®”(dЁЎng)ІЈБ§јУ№ӨНк®…әуҢўІЈБ§ЛНіцөДҫалx���Ј¬ІЈБ§ЛНіцәу¶ЁО»ЭSІЕҝЙТФФЩҙО¶ЁО»�����Ј¬·с„tҢўФміЙІЈБ§өД”DүәәНЖЖ“p��ЎЈ

ЎЎЎЎҲD11 ҝЧ…ў”ө(shЁҙ)ФO(shЁЁ)ЦГ1

ЎЎЎЎҲD12 ҝЧ…ў”ө(shЁҙ)ФO(shЁЁ)ЦГ2
ЎЎЎЎҝЧҫаФO(shЁЁ)¶ЁҝЙёщ“ю(jЁҙ)ГҝӮҖ(gЁЁ)ҙтҝЧО»ЦГҫалxІЈБ§Я…ҫүөДҫалxҒн(lЁўi)¶ЁО»��ЎЈҢҰ(duЁ¬)УЪҝЧөДФO(shЁЁ)ЦГ�����Ј¬Тт?yЁӨn)йІЈБ§ЦрқuЛНЯM(jЁ¬n)Іўй_(kЁЎi)КјҙтҝЧ��Ј¬ҙтҝЧІЈБ§І»ДЬәуНЛ���Ј¬ЛщТФXЧшҳЛ(biЁЎo)Ц»Фцҙу���Ј¬І»•ю(huЁ¬)ңpРЎЈә ��Ј»ЖдЦР�����Ј¬ КЗөЪn+1ӮҖ(gЁЁ)ҝЧөДXЧшҳЛ(biЁЎo)����Ј¬ КЗөЪnёиҝЧөДXЧшҳЛ(biЁЎo)���ЎЈ¶шҢҰ(duЁ¬)УЪXЧшҳЛ(biЁЎo)ФO(shЁЁ)ЦГІ»·ыәП—lјюөД����Ј¬ПөҪy(tЁҜng)•ю(huЁ¬)Ҳу(bЁӨo)ҫҜІўІ»ДЬЯM(jЁ¬n)РРҙтҝЧ��ЎЈ
ЎЎЎЎ8 Х{(diЁӨo)ФҮХf(shuЁӯ)Гч
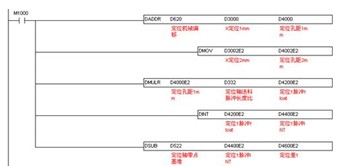
ЎЎЎЎ8.1 ¶ЁО»ЭSО»ЦГУӢ(jЁ¬)Лг
ЎЎЎЎ¶ЁО»ЭSО»ЦГУӢ(jЁ¬)ЛгИзПВЈә

ЎЎЎЎЖдЦР���Ј¬  һй¶ЁО»ЭSҪ^ҢҰ(duЁ¬)¶ЁО»Г}ӣ_”ө(shЁҙ)�����Ј»
һй¶ЁО»ЭSҪ^ҢҰ(duЁ¬)¶ЁО»Г}ӣ_”ө(shЁҙ)�����Ј» һй»щңК(zhЁіn)Г}ӣ_”ө(shЁҙ)�����Ј»
һй»щңК(zhЁіn)Г}ӣ_”ө(shЁҙ)�����Ј»  КЗҷC(jЁ©)РөЖ«ТЖ�Ј¬¶ЁО»УРЖ«Іо•r(shЁӘ)НЁЯ^(guЁ°)Ф“…ў”ө(shЁҙ)РЮХэЈ»
КЗҷC(jЁ©)РөЖ«ТЖ�Ј¬¶ЁО»УРЖ«Іо•r(shЁӘ)НЁЯ^(guЁ°)Ф“…ў”ө(shЁҙ)РЮХэЈ»  „tКЗX·ҪПтҝЧҫалxІЈБ§Я…ҫүҫалx�Ј¬ҢҰ(duЁ¬)‘Ә(yЁ©ng)ҝЧөДXіЯҙзЈ»
„tКЗX·ҪПтҝЧҫалxІЈБ§Я…ҫүҫалx�Ј¬ҢҰ(duЁ¬)‘Ә(yЁ©ng)ҝЧөДXіЯҙзЈ»  һй¶ЁО»ЭSГ}ӣ_ҫалxұИҶОО»Г}ӣ_”ө(shЁҙ)/mm���ЎЈ
һй¶ЁО»ЭSГ}ӣ_ҫалxұИҶОО»Г}ӣ_”ө(shЁҙ)/mm���ЎЈ
ЎЎЎЎҲD13 ¶ЁО»ЭSО»ЦГУӢ(jЁ¬)ЛгКҫТвҲD
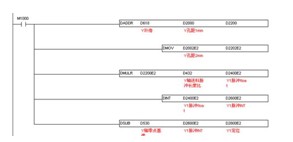
ЎЎЎЎ8.2 YЭSО»ЦГУӢ(jЁ¬)Лг
ЎЎЎЎYЭSО»ЦГУӢ(jЁ¬)ЛгИзПВЈә

ЎЎЎЎЖдЦР��Ј¬  КЗ¶ЁО»ЭSҪ^ҢҰ(duЁ¬)¶ЁО»Г}ӣ_”ө(shЁҙ)��Ј»
КЗ¶ЁО»ЭSҪ^ҢҰ(duЁ¬)¶ЁО»Г}ӣ_”ө(shЁҙ)��Ј» КЗ»щңК(zhЁіn)Г}ӣ_”ө(shЁҙ)����Ј»
КЗ»щңК(zhЁіn)Г}ӣ_”ө(shЁҙ)����Ј»  КЗҷC(jЁ©)РөЖ«ТЖ�����Ј¬¶ЁО»УРЖ«Іо•r(shЁӘ)НЁЯ^(guЁ°)Ф“…ў”ө(shЁҙ)РЮХэ��Ј»
КЗҷC(jЁ©)РөЖ«ТЖ�����Ј¬¶ЁО»УРЖ«Іо•r(shЁӘ)НЁЯ^(guЁ°)Ф“…ў”ө(shЁҙ)РЮХэ��Ј» КЗY·ҪПт����Ј¬ҝЧҫалxІЈБ§Я…ҫүҫалx����Ј¬ҢҰ(duЁ¬)‘Ә(yЁ©ng)ҝЧөДYіЯҙз����Ј»
КЗY·ҪПт����Ј¬ҝЧҫалxІЈБ§Я…ҫүҫалx����Ј¬ҢҰ(duЁ¬)‘Ә(yЁ©ng)ҝЧөДYіЯҙз����Ј»  һй¶ЁО»ЭSГ}ӣ_ҫалxұИҶОО»Г}ӣ_”ө(shЁҙ)/mmЎЈ
һй¶ЁО»ЭSГ}ӣ_ҫалxұИҶОО»Г}ӣ_”ө(shЁҙ)/mmЎЈ
ЎЎЎЎҲD14 YЭSУӢ(jЁ¬)ЛгКҫТвҲD
ЎЎЎЎ8.3 ҝЧО»ЦГСӯӯh(huЁўn)ұИЭ^ҙ_¶Ё
ЎЎЎЎXЧшҳЛ(biЁЎo)ФЪ400mm~1500mm·¶ҮъғИ(nЁЁi)ТАҙОФцҙуФO(shЁЁ)ЦГ�Ј»YЧшҳЛ(biЁЎo)0mm~1500mm·¶ҮъғИ(nЁЁi)ИОТвФO(shЁЁ)ЦГЈ»г@ҝЧ”ө(shЁҙ)БҝКЗ36����ЎЈ¶ЁО»өҪДіӮҖ(gЁЁ)ҝЧөДЧшҳЛ(biЁЎo)Іўй_(kЁЎi)КјҙтҝЧ����Ј¬ҙЛ•r(shЁӘ)ұИЭ^®”(dЁЎng)З°ҝЧөДXЧшҳЛ(biЁЎo)ЕcПВТ»ӮҖ(gЁЁ)ҝЧXЧшҳЛ(biЁЎo)КЗ·сПаН¬ЎЈПаН¬•r(shЁӘ)���Ј¬¶ЁО»ЭSұЈіЦІ»„У(dЁ°ng)��Ј¬YЭSЦШРВ¶ЁО»әуҙтҝЧ�����Ј»І»Н¬•r(shЁӘ)�Ј¬¶ЁО»ТЖ„У(dЁ°ng)ЦБПВТ»¶ЁО»О»ЦГЈ»Н¬•r(shЁӘ)YҙтҝЧҪY(jiЁҰ)КшәуұИЭ^®”(dЁЎng)З°ҝЧөДXЧшҳЛ(biЁЎo)ЕcПВТ»ӮҖ(gЁЁ)ҝЧXЧшҳЛ(biЁЎo)КЗ·сПаН¬����Ј¬ёщ“ю(jЁҙ)ұИЭ^ҪY(jiЁҰ)№ыӣQ¶ЁКЗ·сФЩҙОЛНБПЕcКЗ·сА^Аm(xЁҙ)ҙтҝЧЈ¬ПаН¬„tYЭS¶ЁО»әуҙтҝЧ��Ј»І»Н¬ҫНЛНБПөҪО»����Ј¬YЭS¶ЁО»әуҙтҝЧЈ¬ғЙӮҖ(gЁЁ)„У(dЁ°ng)ЧчН¬•r(shЁӘ)ЯM(jЁ¬n)РРТФМбёЯР§ВК�ЎЈ
ЎЎЎЎҲD15 ҝЧО»ЦГСӯӯh(huЁўn)ФO(shЁЁ)¶Ё
ЎЎЎЎ8.4 №қ(jiЁҰ)ЕДҝШЦЖ
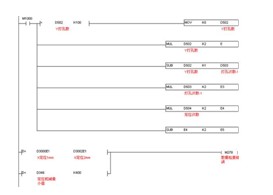
ЎЎЎЎТт?yЁӨn)йҝЧөДО»ЦГІ»ҙ_¶ЁЈ¬ҫНұШнҡФO(shЁЁ)УӢ(jЁ¬)Т»ӮҖ(gЁЁ)ҝЙТФҢҚ(shЁӘ)•r(shЁӘ)УӢ(jЁ¬)ЛгЧшҳЛ(biЁЎo)О»ЦГ����Ј¬м`»оМшЮD(zhuЁЈn)ФЪ¶аӮҖ(gЁЁ)„У(dЁ°ng)ЧчЦРЈ»НЁЯ^(guЁ°)ҢҰ(duЁ¬)ФO(shЁЁ)Ӯд№ӨЛҮ·ҙҸН(fЁҙ)СРҫҝ���Ј¬ҙ_¶ЁғЙӮҖ(gЁЁ)ЦШТӘөДҝШЦЖ№қ(jiЁҰ)ЕДЈә
ЎЎЎ�����ЎЈЁ1Ј©¶ЁО»ЭS¶ЁО»���Ј¬ТФЙППВұP(pЁўn)үәҫo•r(shЁӘ)ҷC(jЁ©)һй»щңК(zhЁіn)���Ј¬УӢ(jЁ¬)ЛгҙтҝЧ¶ЁО»ҙО”ө(shЁҙ)Ј»
ЎЎЎ�ЎЈЁ2Ј©YЭS¶ЁО»Ј¬ТФҙтҝЧНк®…•r(shЁӘ)ҷC(jЁ©)һй»щңК(zhЁіn)�����Ј¬УӢ(jЁ¬)ЛгYЭS¶ЁО»ҙО”ө(shЁҙ)�����ЎЈ

ЎЎЎЎҲD16
ЎЎЎЎE5=ЈЁ¶ЁО»ҙО”ө(shЁҙ)-1Ј©*2
ЎЎЎЎНЁЯ^(guЁ°)ЦёбҳөДСӯӯh(huЁўn)УӢ(jЁ¬)Лг��Ј¬м`»оөДҢҰ(duЁ¬)®”(dЁЎng)З°”ө(shЁҙ)“ю(jЁҙ)ЕcПВТ»№P”ө(shЁҙ)“ю(jЁҙ)ЯM(jЁ¬n)РРұИЭ^��ЎЈЧчһйұИЭ^ҪY(jiЁҰ)№ы��Ј¬ФЪН¬Т»ІҪЯM(jЁ¬n)іМРтЦР��Ј¬ҝЙТФМшЮD(zhuЁЈn)өҪ¶аӮҖ(gЁЁ)ҢҰ(duЁ¬)‘Ә(yЁ©ng)өДҝШЦЖІҪЦР��Ј»ТФЦёбҳөД·ҪКҪ��Ј¬ҝЙТФФЪТҺ(guЁ©)„қТ»ӮҖ(gЁЁ)ЯBАm(xЁҙ)өД”ө(shЁҙ)“ю(jЁҙ)…^(qЁұ)Утәу�Ј¬НкіЙТ»Еъ„У(dЁ°ng)ЧчФO(shЁЁ)УӢ(jЁ¬)ЎЈ
ЎЎЎЎ9 ҪY(jiЁҰ)КшХZ(yЁі)
ЎЎЎЎұҫҝоИ«ЧФ„У(dЁ°ng)”ө(shЁҙ)ҝШҙтҝЧҷC(jЁ©)�Ј¬ҫЯУРИэҙуМШьc(diЁЈn)ЎЈөЪТ»��Ј¬ЦШҸН(fЁҙ)өДјУ№Өҫ«¶ИТӘЗуёЯЈЁРЎУЪ0.5mmЈ©����Ј»өЪ¶юЈ¬ёЎьc(diЁЈn)”ө(shЁҙ)Я\(yЁҙn)ЛгБҝҙу���Ј»өЪИэ����Ј¬јУ№Ө„У(dЁ°ng)Ччм`»о��Ј¬РиТӘИбРФөДҫҺіМ����Ј¬РиТӘЯm•r(shЁӘ)м`»оөДқM(mЁЈn)ЧгҝН‘ф(hЁҙ)өД”U(kuЁ°)ідРиЗуЎЈ
ЎЎЎЎҒн(lЁўi)ФҙУЪЕ_(tЁўi)Я_(dЁў)ЛЕ·ютҢ(qЁұ)„У(dЁ°ng)ЖчөДёЯҫ«¶ИәНSVҝШЦЖЖчҸҠ(qiЁўng)ҙуөДёЎьc(diЁЈn)”ө(shЁҙ)Я\(yЁҙn)ЛгДЬБҰ�����Ј¬әЬәГөШҢҚ(shЁӘ)¬F(xiЁӨn)БЛІЈБ§ҙтҝЧјУ№ӨЦРҝЧҫаЎўҝЧ”ө(shЁҙ)УӢ(jЁ¬)Лг�Ј»АыУГEЦёбҳЖ«ТЖЈ¬ҝЙТФҢҚ(shЁӘ)¬F(xiЁӨn)м`»о”U(kuЁ°)ідҝЧ”ө(shЁҙ)�Ј¬ПааҸғЙҝЧйgТАҙОұИЭ^өИ№ҰДЬЈ¬ҝЙТФЯ_(dЁў)өҪм`»о”U(kuЁ°)ідҙтҝЧ”ө(shЁҙ)БҝөДИбРФіМРтФO(shЁЁ)УӢ(jЁ¬)ТӘЗу��ЎЈҪиЦъЕ_(tЁўi)Я_(dЁў)ҝШЦЖЖчм`»оөДІҪЯM(jЁ¬n)іМРтФO(shЁЁ)УӢ(jЁ¬)�����Ј¬ҝЙТФМҺАнҝШЦЖ„У(dЁ°ng)ЧчөДҪ»ІжБчіМ�����Ј¬МбёЯБЛіМРтФO(shЁЁ)УӢ(jЁ¬)Р§ВК�ЎЈҫCЙПЛщКцЈ¬Ф“ФO(shЁЁ)ӮдөДҝШЦЖҫ«¶ИәН№ӨЛҮТӘЗуФЪРРҳI(yЁЁ)ғИ(nЁЁi)ҢЩУЪЭ^ёЯөДЛ®ЖҪ��ЎЈ
ЎЎЎЎҙЛНв����Ј¬ҢҰ(duЁ¬)УЪҝН‘ф(hЁҙ)№ӨЛҮөДКмПӨіМ¶И�Ј¬ӣQ¶ЁБЛХыӮҖ(gЁЁ)ҝШЦЖБчіМөДЩ|(zhЁ¬)БҝЈ»ФO(shЁЁ)ӮдөДҷC(jЁ©)РөҪY(jiЁҰ)ҳӢ(gЁ°u)��Ј¬ТІЦұҪУУ°н‘ФO(shЁЁ)ӮдөДҝШЦЖҫ«¶ИЎЈ®”(dЁЎng)И»��Ј¬ПаұИЖдЛыіЙКмөДЧФ„У(dЁ°ng)ҙтҝЧФO(shЁЁ)Ӯд��Ј¬Ф“ФO(shЁЁ)ӮдТІУРІ»ЧгЦ®МҺ�����Ј¬ЦчТӘұн¬F(xiЁӨn)ФЪЈәРЈңК(zhЁіn)ҝЧөДО»ЦГІЙУГ485НЁУҚЧxИЎЛЕ·юО»ЦГ·ҪКҪЛЩВКј°·Җ(wЁ§n)¶ЁРФөН���Ј¬PLCөДҝШЦЖЛЩ¶ИЭ^”ө(shЁҙ)ҝШөН����Ј»ө«КЗПаұИ”ө(shЁҙ)ҝШПөҪy(tЁҜng)�����Ј¬К№УГЕ_(tЁўi)Я_(dЁў)PLCҝЙТФұЈЧCлҠҡвҝШЦЖіЙұҫН¶ИлөГөҪУРР§өДҝШЦЖ��ЎЈН¬•r(shЁӘ)���Ј¬Е_(tЁўi)Я_(dЁў)РЎРНPLCм`»оөДҝШЦЖіМРтФO(shЁЁ)УӢ(jЁ¬)��Ј¬ҙуИЭБҝіМРтҙжғҰ(chЁі)���Ј¬ҝЙТФқM(mЁЈn)ЧгУГ‘ф(hЁҙ)ҙуБҝ���ЎўҸН(fЁҙ)лsөДіМРтФO(shЁЁ)УӢ(jЁ¬)Ј¬ҪoУГ‘ф(hЁҙ)Һ§Ғн(lЁўi)м`»оөДФO(shЁЁ)УӢ(jЁ¬)уwтһ(yЁӨn)���Ј¬уw¬F(xiЁӨn)БЛЕ_(tЁўi)Я_(dЁў)РЎРНҝШЦЖЖчҸҠ(qiЁўng)ҙуөДҝШЦЖәНЯ\(yЁҙn)ЛгМҺАнДЬБҰ�����Ј¬Н»п@БЛЕ_(tЁўi)Я_(dЁў)HMI®a(chЁЈn)Ж·�ЎўЛЕ·ю®a(chЁЈn)Ж·���ЎўЧғоlЖч®a(chЁЈn)Ж·өДТЧУГРФәНҢҚ(shЁӘ)УГРФ�����ЎЈ
ЎЎЎЎЧчХЯәҶ(jiЁЈn)ҪйЈә
ЎЎЎЎё¶ХС����Ј¬іцЙъ1984Дк2ФВ����Ј¬®…ҳI(yЁЁ)УЪСаЙҪҙуҢW(xuЁҰ)ңy(cЁЁ)ҝШјјРg(shЁҙ)ЕcғxЖчҢЈ(zhuЁЎn)ҳI(yЁЁ)ЎЈ¬F(xiЁӨn)ИОЦРЯ_(dЁў)лҠНЁ№Й·ЭУРПЮ№«ЛҫЙПәЈҷC(jЁ©)лҠҳI(yЁЁ)„Х(wЁҙ)МҺ‘Ә(yЁ©ng)УГ№ӨіМҺҹ����Ј¬ҸДКВЕ_(tЁўi)Я_(dЁў)ҷC(jЁ©)лҠ®a(chЁЈn)Ж·өДКЫЗ°ЎўКЫЦРј°КЫәуөДёчн—(xiЁӨng)јјРg(shЁҙ)Ц§іЦ№ӨЧч���ЎЈ